Peloton is continuing to expand into products other than stationary bikes and treadmills with a new strength training app called Peloton Strength+. The iOS-only app will give current and future Peloton subscribers access to audio-guided strength workouts that can be performed at the gym.
The fitness company initially started testing a beta version of the app in September, which Peloton says informed features like bookmarking custom workouts and the ability to swap and reorder movements. The final version also includes a tool for generating new workouts based on how much time you have, your experience level, or available equipment, instructional how-to videos and “in-ear coaching” to keep you on track while you’re working out. Like many other fitness apps, Strength+ can also connect to an Apple Watch to display metrics like your heart rate and calories burned and let you log weights and reps from your wrist. None of these features are radically different from what you can get from other popular apps like Fitbod or SmartGym, save for Peloton’s focus on audio and the company’s roster of popular fitness instructors.
In the years following the pandemic, Peloton has struggled to adjust to the changing demand for its subscription hardware. Not everyone wanted a Peloton Tread or Bike in their living room when the option to pay less to use one in public became available. Peloton has tried various strategies to recapture its popularity since then, making it possible to access Peloton workouts without expensive hardware, launching a fitness-tracking camera called Guide with a strength workout focus similar to Strength and even selling a rowing machine. Nothing has matched the sales highs the company experienced during the pandemic. Selling subscriptions to the Peloton app and Strength+ seems like a viable way to grow in the inevitable future where most people don’t care about Peloton hardware.
Peloton Strength+ will be available for a limited time at $1 per month for the first six months. Afterward, a subscription to Strength+ will cost $9.99 per month. Current Peloton All Access, Guide, and App+ subscribers can use Strength+ at no additional cost.
This article originally appeared on Engadget at https://www.engadget.com/apps/peloton-is-introducing-a-new-audio-focused-strength-training-app-222145376.html?src=rss
OpenAI has partnered with defense startup Anduril Industries to develop AI for the Pentagon. The companies said on Wednesday that they’ll combine OpenAI’s models, including GPT-4o and OpenAI o1, with Anduril’s systems and software to improve the US military’s defenses against unpiloted aerial attacks.
The deal comes less than a year after OpenAI softened its stance on using its models for military purposes. Although the ChatGPT maker’s policies still prohibit its models from developing or using weapons, it deleted a line in January that explicitly banned integrating its tech into “military and warfare” use. The company said at the time it was already working with DARPA on cybersecurity tools. In October, the company hired a former Palantir security officer and was reportedly pitching its products to the US military and national security establishment.
An OpenAI spokesperson toldThe Washington Post that the deal complies with the company’s rules because it focuses on systems that defend against pilotless aerial threats. The company said the partnership doesn’t cover other uses.
According to The Washington Post, the OpenAI-Anduril partnership will aim to improve the latter’s tech for detecting and shooting down drones threatening the US military and its allies. The Pentagon already buys Anduril’s Roadrunner drone interceptor (pictured above) to help counter the rise of smaller drones on the world’s battlefields. The startup sells sentry towers, comms jammers, military drones and an autonomous submarine, among other projects.
The companies framed the partnership as a way to defend US military personnel and counter China’s advancing AI. “Our partnership with OpenAI will allow us to utilize their world-class expertise in artificial intelligence to address urgent Air Defense capability gaps across the world,” Anduril CEO Brian Schimpf wrote in a statement. “Together, we are committed to developing responsible solutions that enable military and intelligence operators to make faster, more accurate decisions in high-pressure situations.”
Anduril was co-founded by Oculus Rift inventor (and Oculus VR co-founder) Palmer Luckey. That headset laid the foundation for the Meta Quest lineup, which today holds the lion’s share of the VR and AR market. Luckey left Meta (then Facebook) in 2017, months after news broke that he donated $10,000 to a group aiming to post 4chan-style anti-Hillary Clinton memes on roadside billboards.
“OpenAI builds AI to benefit as many people as possible, and supports U.S.-led efforts to ensure the technology upholds democratic values,” OpenAI CEO Sam Altman wrote in a statement. “Our partnership with Anduril will help ensure OpenAI technology protects U.S. military personnel, and will help the national security community understand and responsibly use this technology to keep our citizens safe and free.”
This article originally appeared on Engadget at https://www.engadget.com/ai/openai-signs-deal-with-palmer-luckeys-anduril-to-develop-military-ai-213356951.html?src=rss
With the end date for Windows 10 less than a year away, people still using that operating system will need to start preparing to enter the Windows 11 era. And Microsoft is placing a hardware requirement on the current OS that could pose a problem for those of us using older machines.
Windows 11 will require computers to have TPM 2.0. Also known as a Trusted Platform Module, this is a dedicated chip or firmware used for device security, and the 2.0 version offers several useful features for improved cryptography and encryption. A blog post from Microsoft outlines all of the benefits and why it’s being made a core part of Windows 11 installations. Notably, the latest TPM can help future-proof the three-year-old operating system “by helping to protect sensitive information as more AI capabilities come to physical, cloud, and server architecture.”
That’s all well and good, but many older machines don’t have TPM 2.0. That version became the hardware standard for Windows computers in 2016. Savvy users may have been able to use Windows 11 on incompatible computers with workarounds, but Microsoft’s language that “TPM 2.0 is not just a recommendation—it’s a necessity” indicates that the company will likely be getting more stringent about preventing those bypasses. You can check the TPM status of your computer with Microsoft’s PC Health Check app ahead of the October 14, 2025 end of support date for Windows 10.
This article originally appeared on Engadget at https://www.engadget.com/computing/microsoft-confirms-the-windows-11-tpm-security-requirement-isnt-going-anywhere-211002424.html?src=rss
Just when it seemed like PC support was Sony’s final word on the PlayStation VR2, the company is showing off hand tracking for the virtual reality headset. As spotted by UploadVR, Sony has been demoing controller-free hand-tracking support on the PSVR2 at SIGGRAPH Asia 2024, an academic conference and tradeshow focused on “computer graphics and interactive techniques.”
Sony hasn’t released any official announcement explaining the new feature, but a published description of what it’s presenting at SIGGRAPH does mention that hand-tracking support is “available with the latest development kit of PlayStation 5.” Mixed noticed that Sony had filed a patent for several different hand-tracking features in May 2023, but this is the first instance of that work running on an actual headset.
Besides feeling more natural than swinging around a controller, hand-tracking allows for more nuanced movements and controls in apps and games. When you press a virtual button in a game with hand tracking, you might not feel the haptic feedback you’d get from gripping a controller, but what you’re doing with your hand is much more like real life. A video of the demo shared on X shows hand-tracking working on a PSVR2 with a similar level of fidelity and latency to hand-tracking on a Quest 3, so it seems like Sony’s feature could work well.
While it’s weird that the company hasn’t turned this into an announcement yet, the fact that hand-tracking support exists is a good sign for headset owners that Sony is still invested. The PSVR 2 was released in 2023 as an impressive, if expensive, piece of VR hardware. Things like headset haptics, eye-tracking and a great first-party game in Horizon VR: Call of the Mountain made it stand out. But since then, the headset hasn’t seen nearly the support it needs to catch on. Major internal studios haven’t developed many VR games, and Sony has laid off developers from studios that have, like the creators of Call of the Mountain, Firesprite. In June, Android Central reported that Sony had also severely cut its budget for future VR development.
The release of the PS VR2 PC adaptor in August 2024 seemed like the final nail in the coffin. If Sony wasn’t going to make more games, then at least you could play through the gigantic library of PC VR games on Steam. Hand-tracking support might not mean Sony’s commitment to the VR headset has changed since then, but it is a sign that the PSVR2 can improve even if it’s never a priority.
This article originally appeared on Engadget at https://www.engadget.com/gaming/playstation/playstation-vr2-will-get-hand-tracking-support-soon-204155147.html?src=rss
This article begins a series for anyone who finds matrix algebra overwhelming. My goal is to turn what you’re afraid of into what you’re fascinated by. You’ll find it especially helpful if you want to understand machine learning concepts and methods.
Table of contents:
Introduction
Prerequisites
Matrix-vector multiplication
Transposition
Composition of transformations
Inverse transformation
Non-invertible transformations
Determinant
Non-square matrices
Inverse and Transpose: similarities and differences
Translation by a vector
Final words
1. Introduction
You’ve probably noticed that while it’s easy to find materials explaining matrix computation algorithms, it’s harder to find ones that teach how to interpret complex matrix expressions. I’m addressing this gap with my series, focused on the part of matrix algebra that is most commonly used by data scientists.
We’ll focus more on concrete examples rather than general formulas. I’d rather sacrifice generality for the sake of clarity and readability. I’ll often appeal to your imagination and intuition, hoping my materials will inspire you to explore more formal resources on these topics. For precise definitions and general formulas, I’d recommend you look at some good textbooks: the classic one on linear algebra¹ and the other focused on machine learning².
This part will teach you
to see a matrix as a representation of the transformation applied to data.
Let’s get started then — let me take the lead through the world of matrices.
2. Prerequisites
I’m guessing you can handle the expressions that follow.
This is the dot product written using a row vector and a column vector:
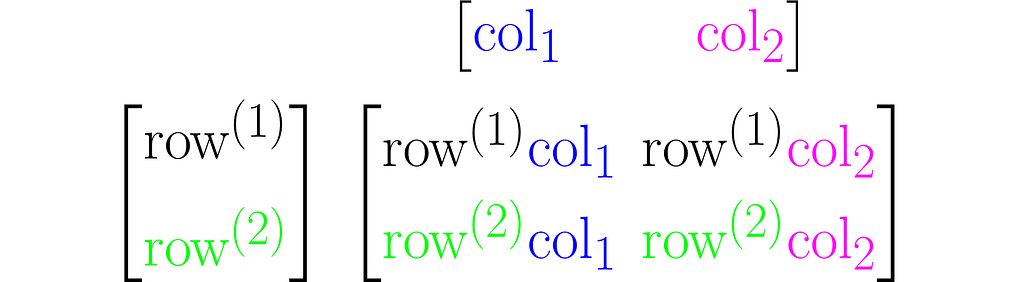
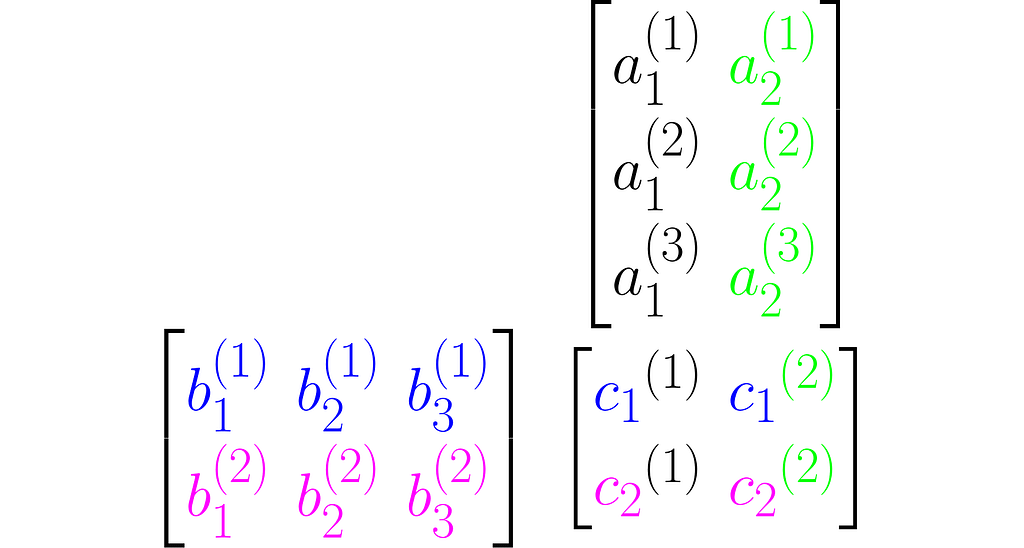
A matrix is a rectangular array of symbols arranged in rows and columns. Here is an example of a matrix with two rows and three columns:
You can view it as a sequence of columns
or a sequence of rows stacked one on top of another:
As you can see, I used superscripts for rows and subscripts for columns. In machine learning, it’s important to clearly distinguish between observations, represented as vectors, and features, which are arranged in rows.
Other interesting ways to represent this matrix are A₂ₓ₃ and A[aᵢ⁽ʲ ⁾].
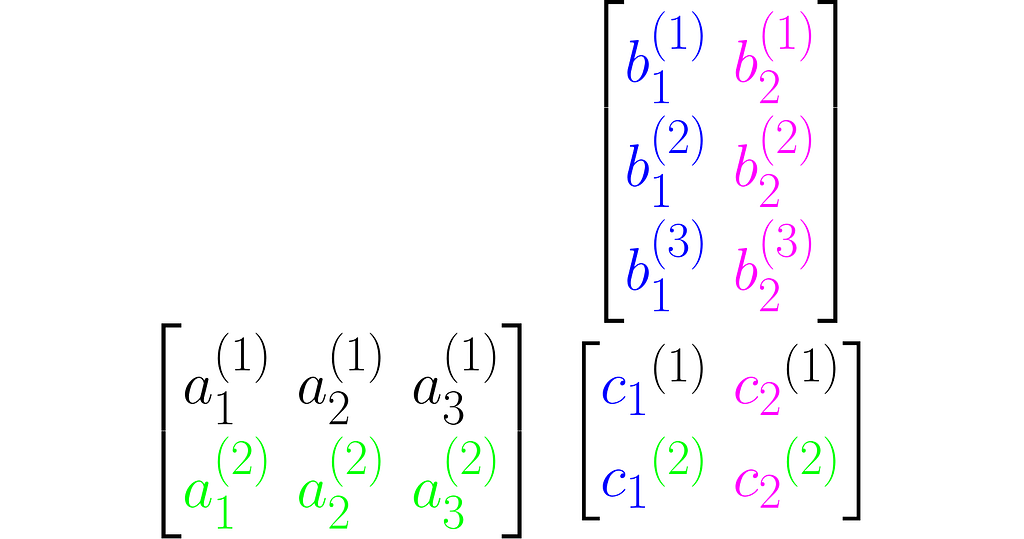
Multiplying two matrices A and B results in a third matrix C = AB containing the scalar products of each row of A with each column of B, arranged accordingly. Below is an example for C₂ₓ₂= A₂ₓ₃B₃ₓ₂.
where cᵢ⁽ʲ ⁾ is the scalar product of the i-th column of the matrix B and the j-th row of matrix A:
Note that this definition of multiplication requires the number of rows of the left matrix to match the number of columns of the right matrix. In other words, the inner dimensions of the matrices must match.
Make sure you can manually multiply matrices with arbitrary entries. You can use the following code to check the result or to practice multiplying matrices.
import numpy as np
# Matrices to be multiplied A = [ [ 1, 0, 2], [-2, 1, 1] ]
B = [ [ 0, 3, 1], [-3, 1, 1], [-2, 2, 1] ]
# Convert to numpy array A = np.array(A) B = np.array(B)
# Multiply A by B (if possible) try: C = A @ B print(f'A B = n{C}n') except: print("""ValueError: The number of rows in matrix A does not match the number of columns in matrix B """)
# and in the reverse order, B by A (if possible) try: D = B @ A print(f'B A =n{D}') except: print("""ValueError: The number of rows in matrix B does not match the number of columns in matrix A """)
A B = [[-4 7] [-5 -3]]
B A = [[-6 3 3] [-5 1 -5] [-6 2 -2]]
3. Matrix-vector multiplication
In this section, I will explain the effect of matrix multiplication on vectors. The vector x is multiplied by the matrix A, producing a new vector y:
This is a common operation in data science, as it enables a linear transformation of data. The use of matrices to represent linear transformations is highly advantageous, as you will soon see in the following examples.
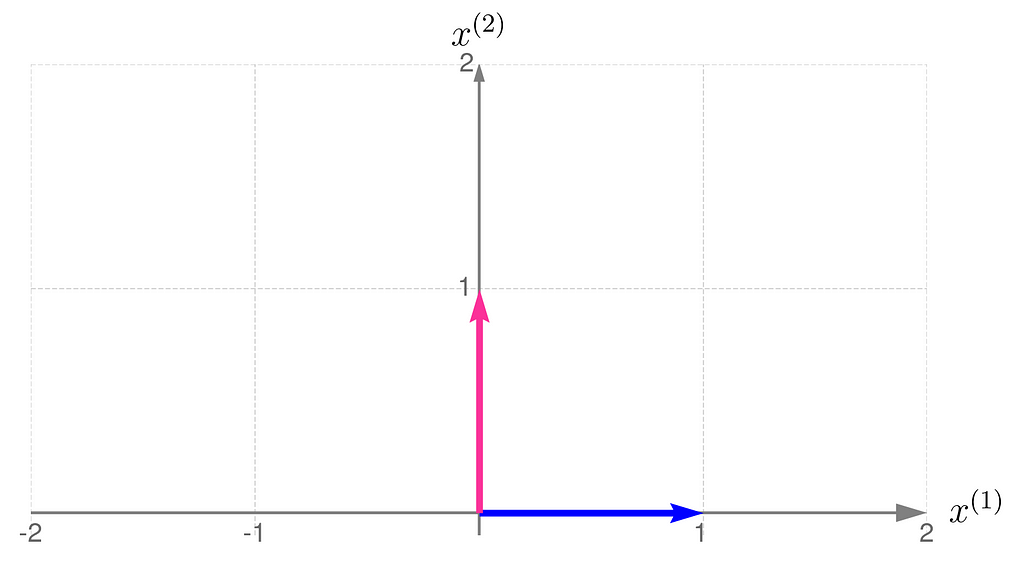
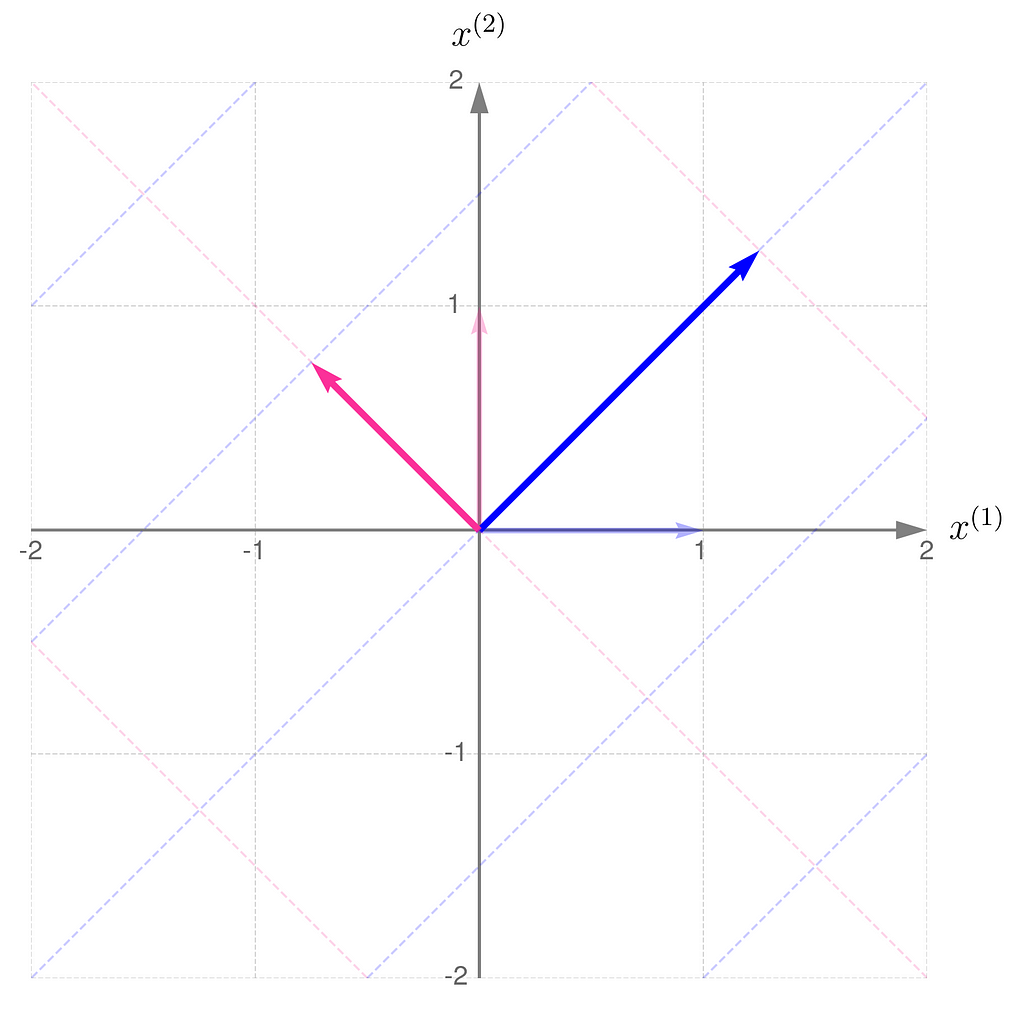
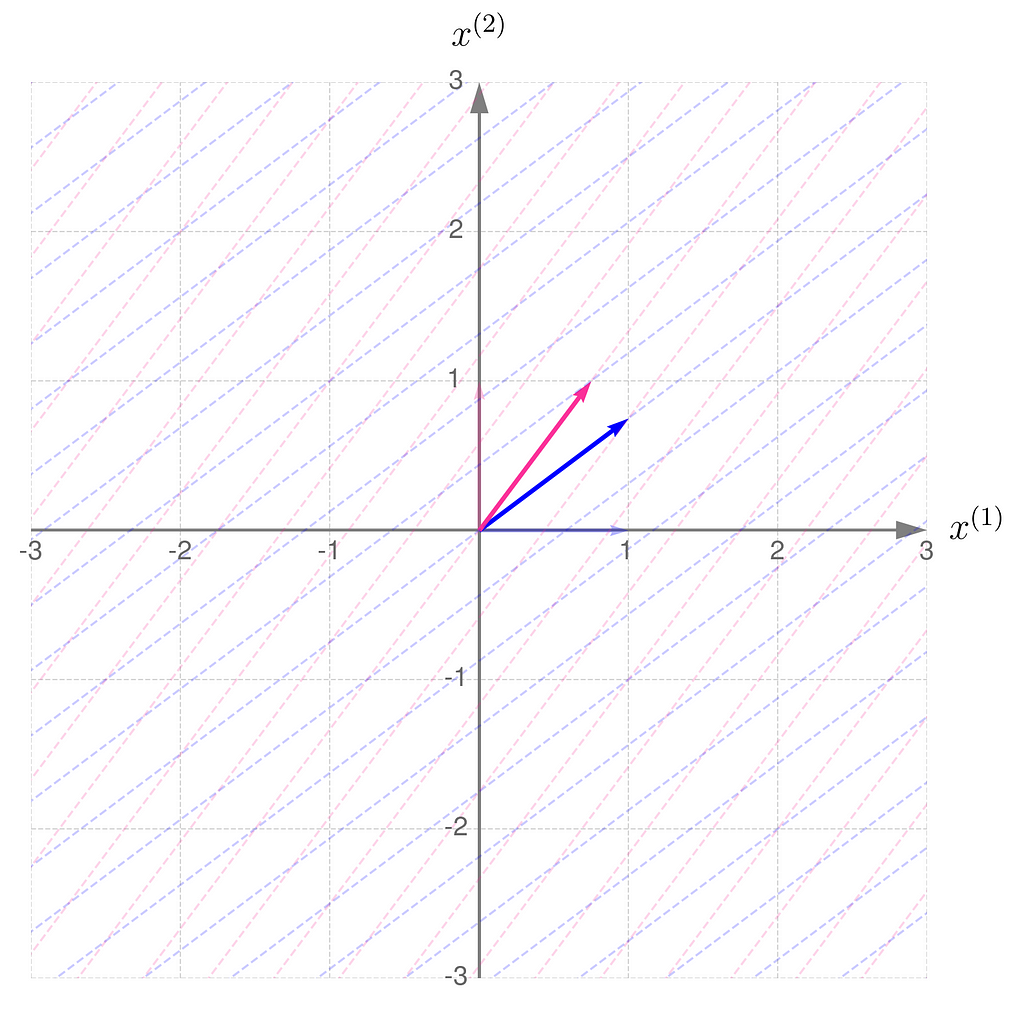
Below, you can see your grid space and your standard basis vectors: blue for the x⁽¹⁾ direction and magenta for the x⁽²⁾ direction.
Standard basis in a Grid Space
A good starting point is to work with transformations that map two-dimensional vectors x into two-dimensional vectors y in the same grid space.
Describing the desired transformation is a simple trick. You just need to say how the coordinates of the basis vectors change after the transformation and use these new coordinates as the columns of the matrix A.
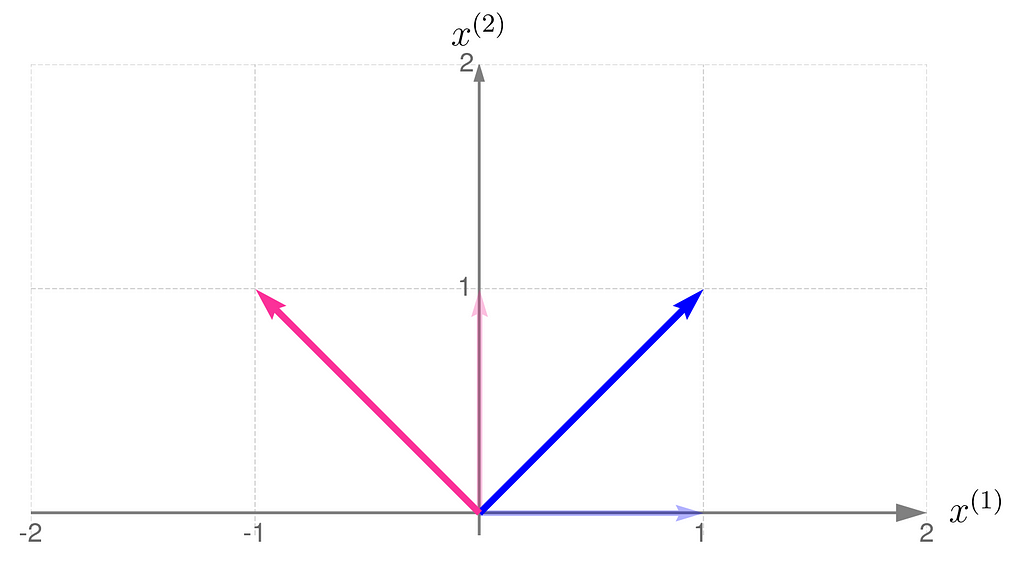
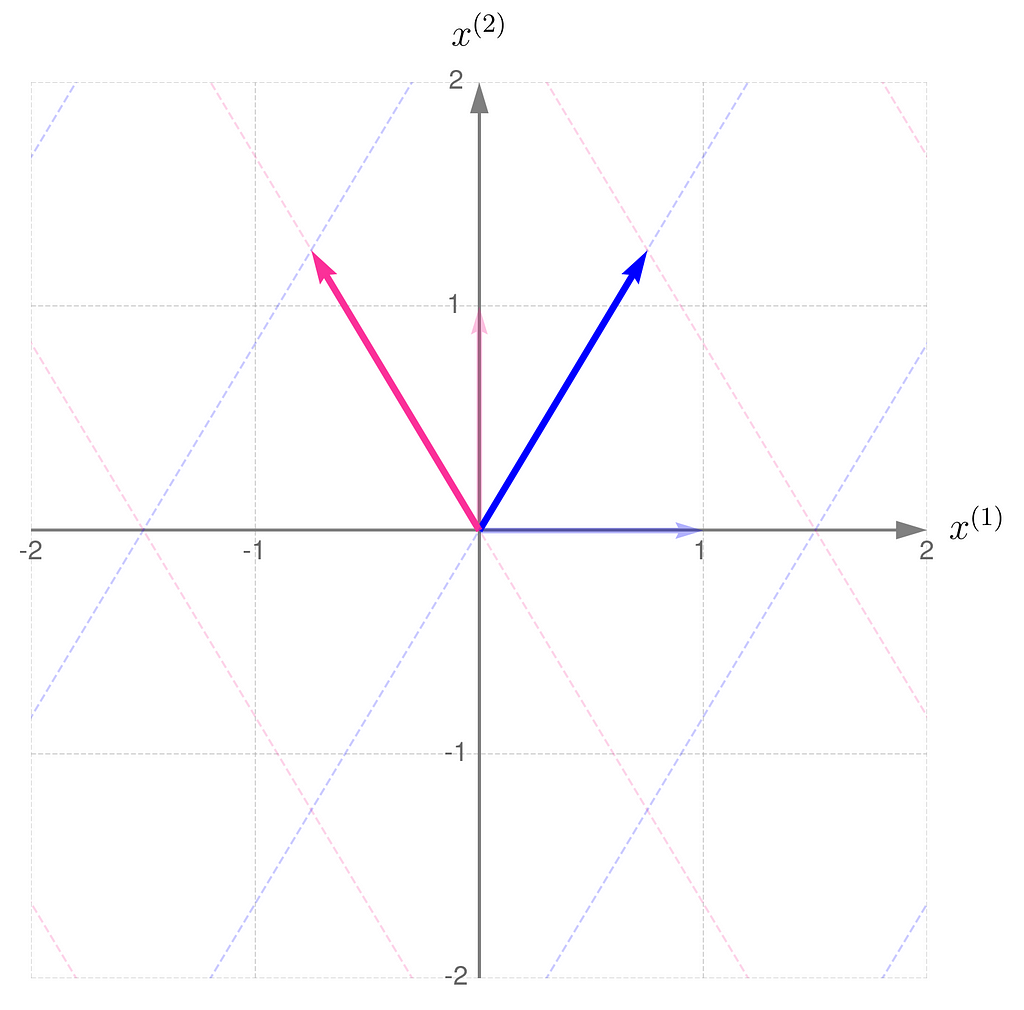
As an example, consider a linear transformation that produces the effect illustrated below. The standard basis vectors are drawn lightly, while the transformed vectors are shown more clearly.
Standard basis transformed by matrix A
From the comparison of the basis vectors before and after the transformation, you can observe that the transformation involves a 45-degree counterclockwise rotation about the origin, along with an elongation of the vectors.
This effect can be achieved using the matrix A, composed as follows:
The first column of the matrix contains the coordinates of the first basis vector after the transformation, and the second column contains those of the second basis vector.
The equation (1) then takes the form
Let’s take two example points x₁and x₂ :
and transform them into the vectors y₁ and y₂ :
I encourage you to do these calculations by hand first, and then switch to using a program like this:
# Points (vectors) to be transformed using matrix A points = [ np.array([1, 1/2]), np.array([-1/4, 5/4]) ]
# Print out the transformed points (vectors) for i, x in enumerate(points): y = A @ x print(f'y_{i} = {y}')
y_0 = [0.5 1.5] y_1 = [-1.5 1. ]
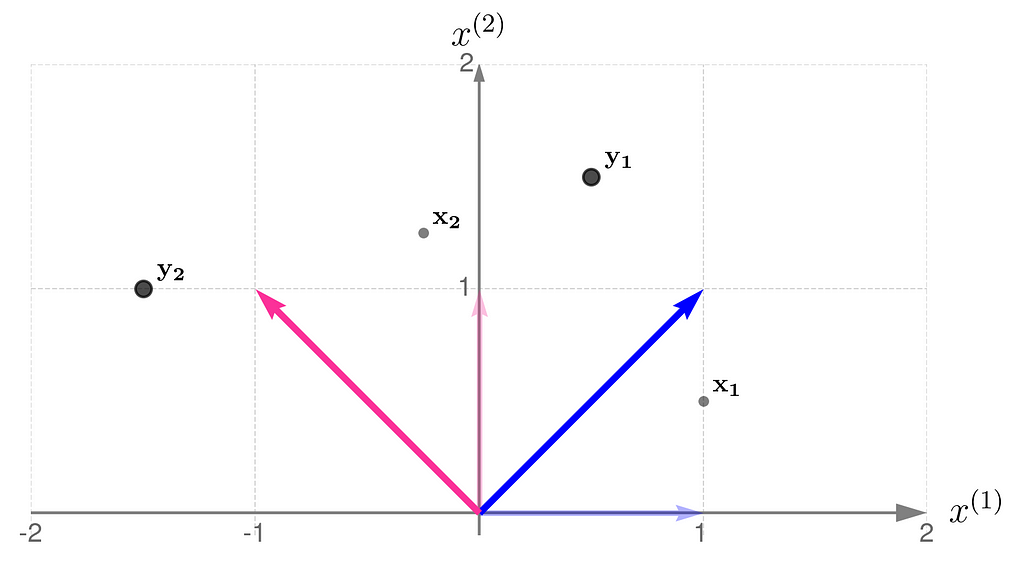
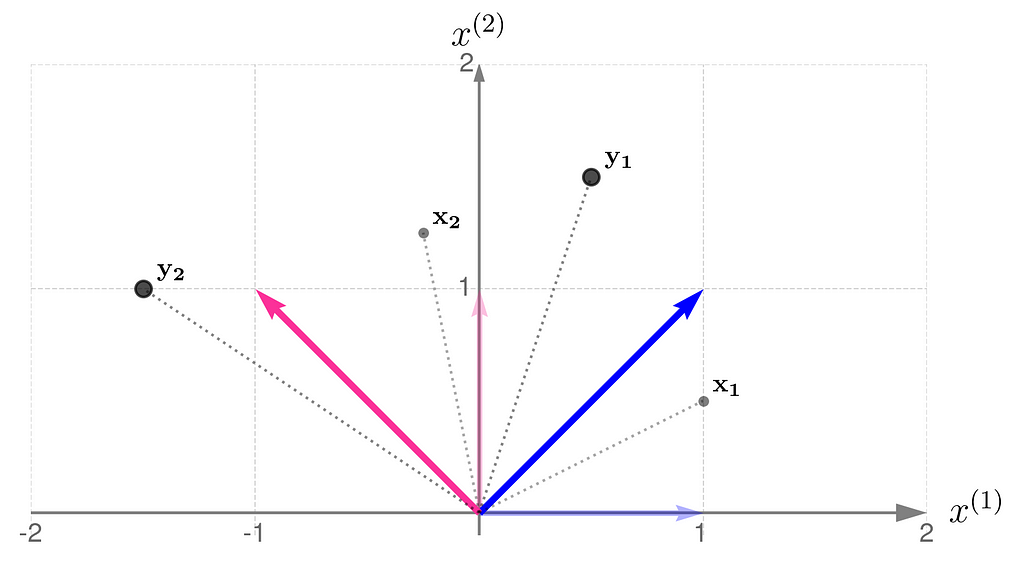
The plot below shows the results.
Points transformed by matrix A
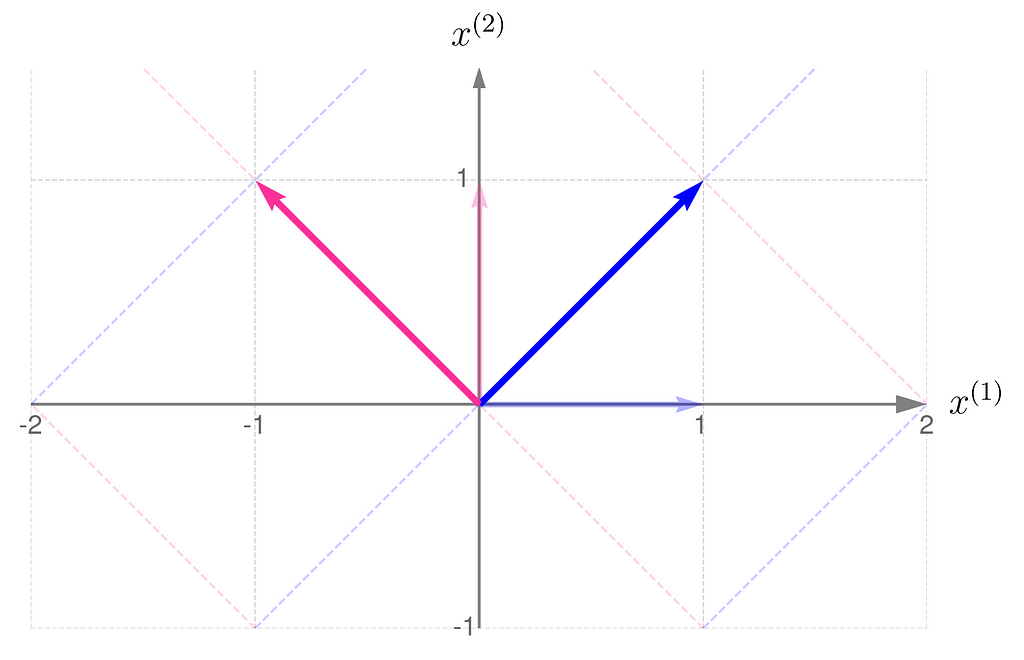
The x points are gray and smaller, while their transformed counterparts y have black edges and are bigger. If you’d prefer to think of these points as arrowheads, here’s the corresponding illustration:
Vectors transformed by matrix A
Now you can see more clearly that the points have been rotated around the origin and pushed a little away.
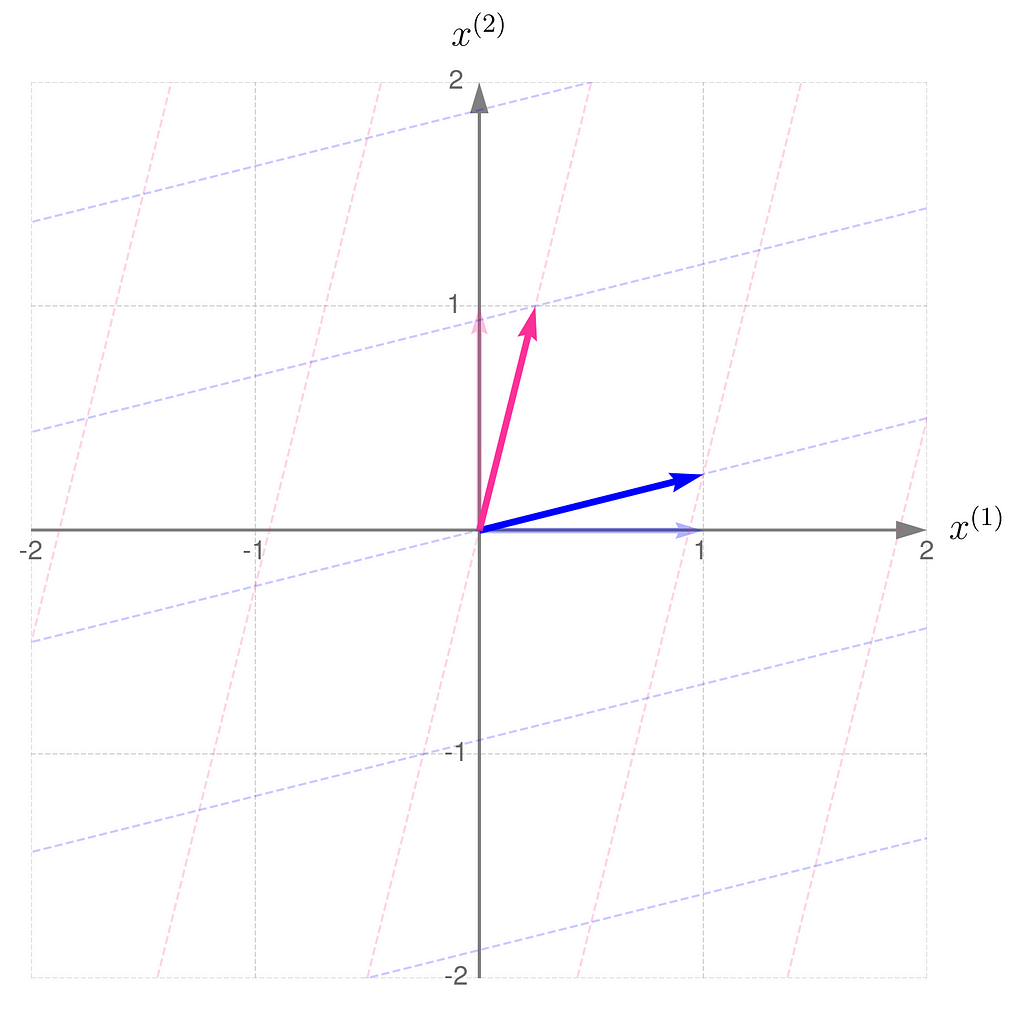
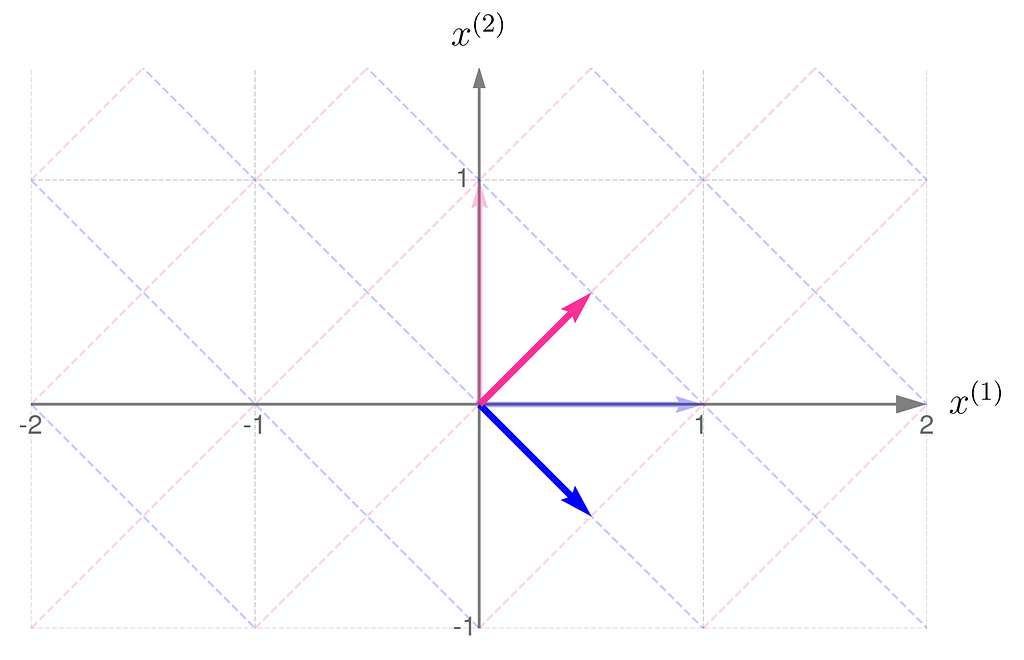
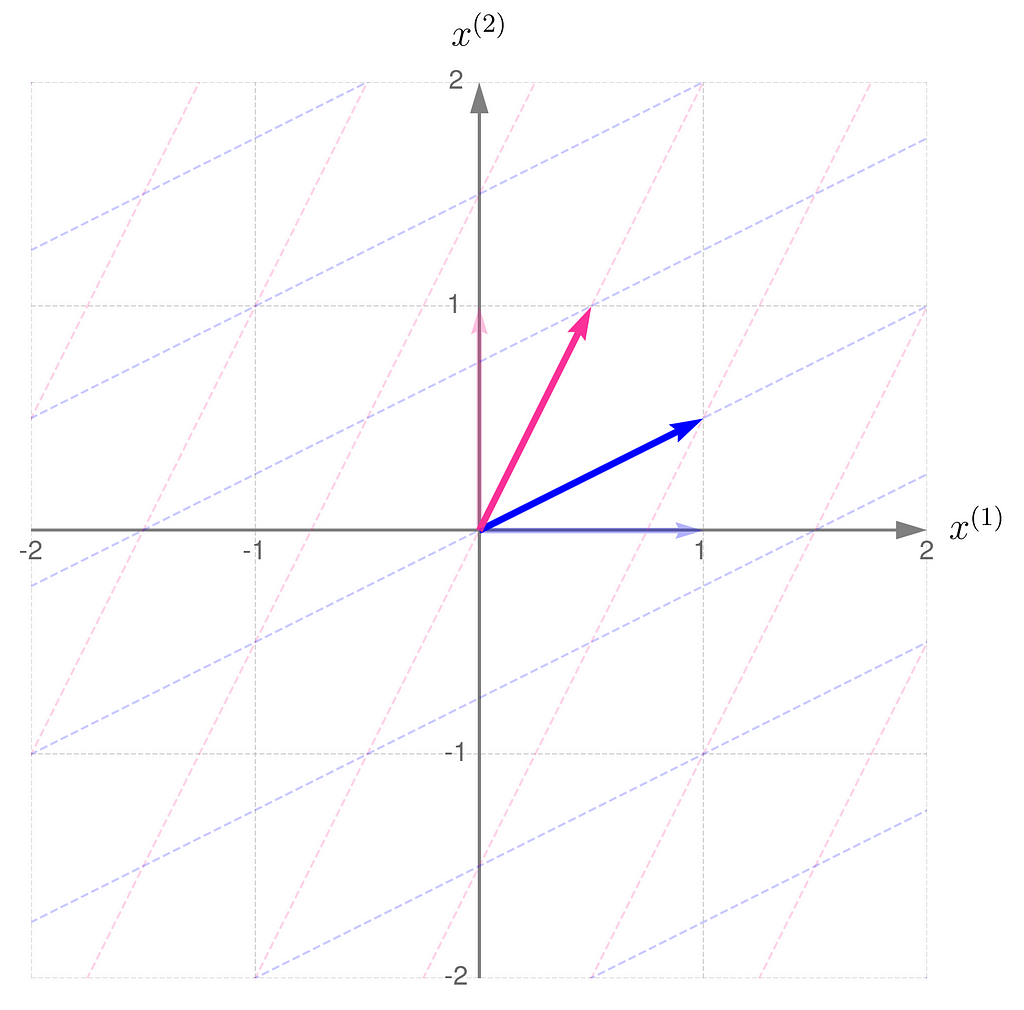
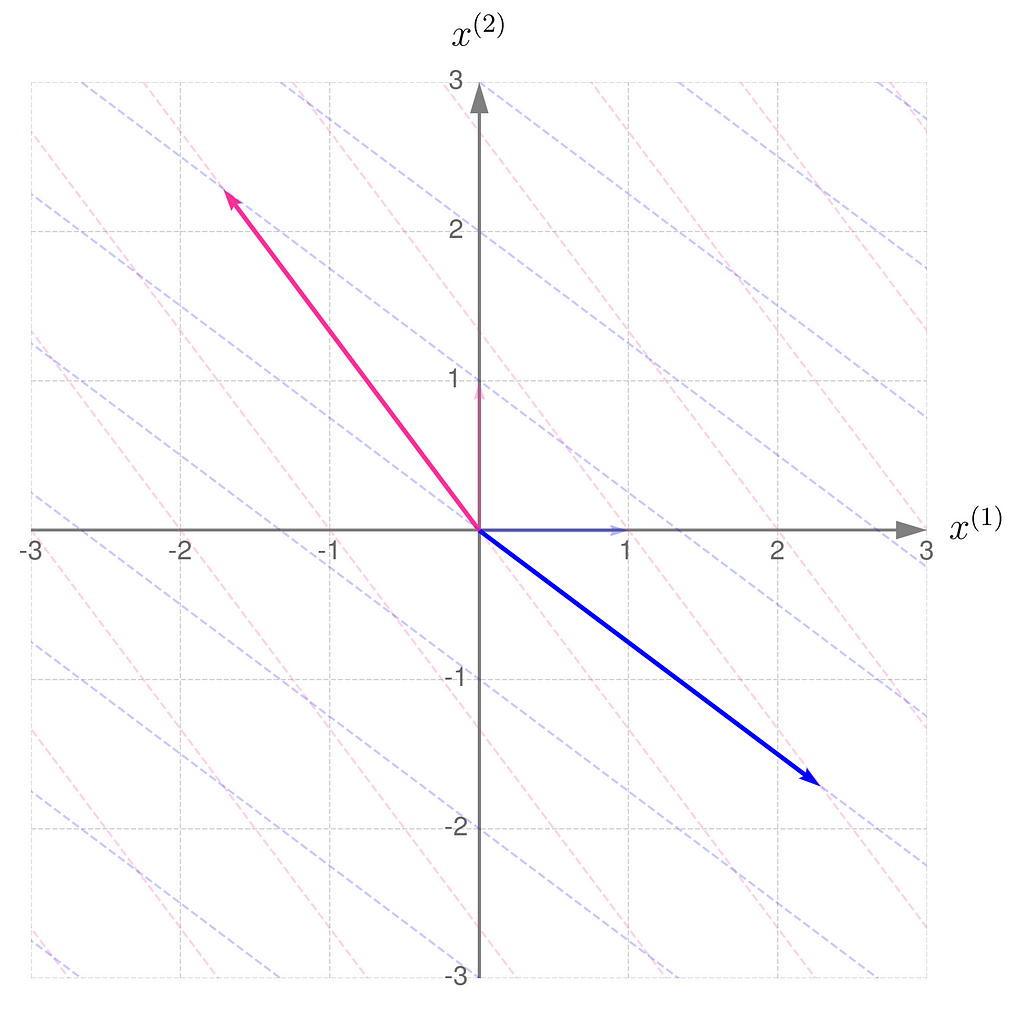
Let’s examine another matrix:
and see how the transformation
affects the points on the grid lines:
Grid lines transformed by matrix B
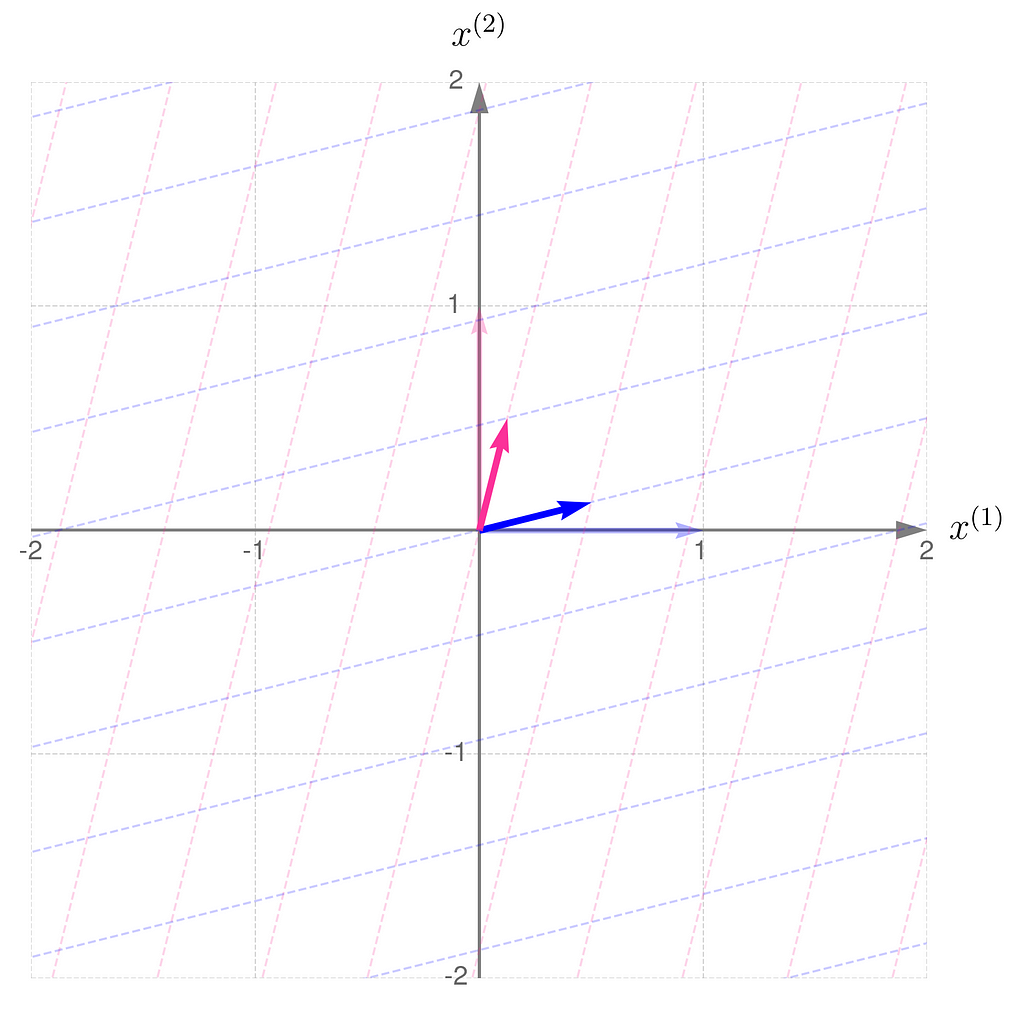
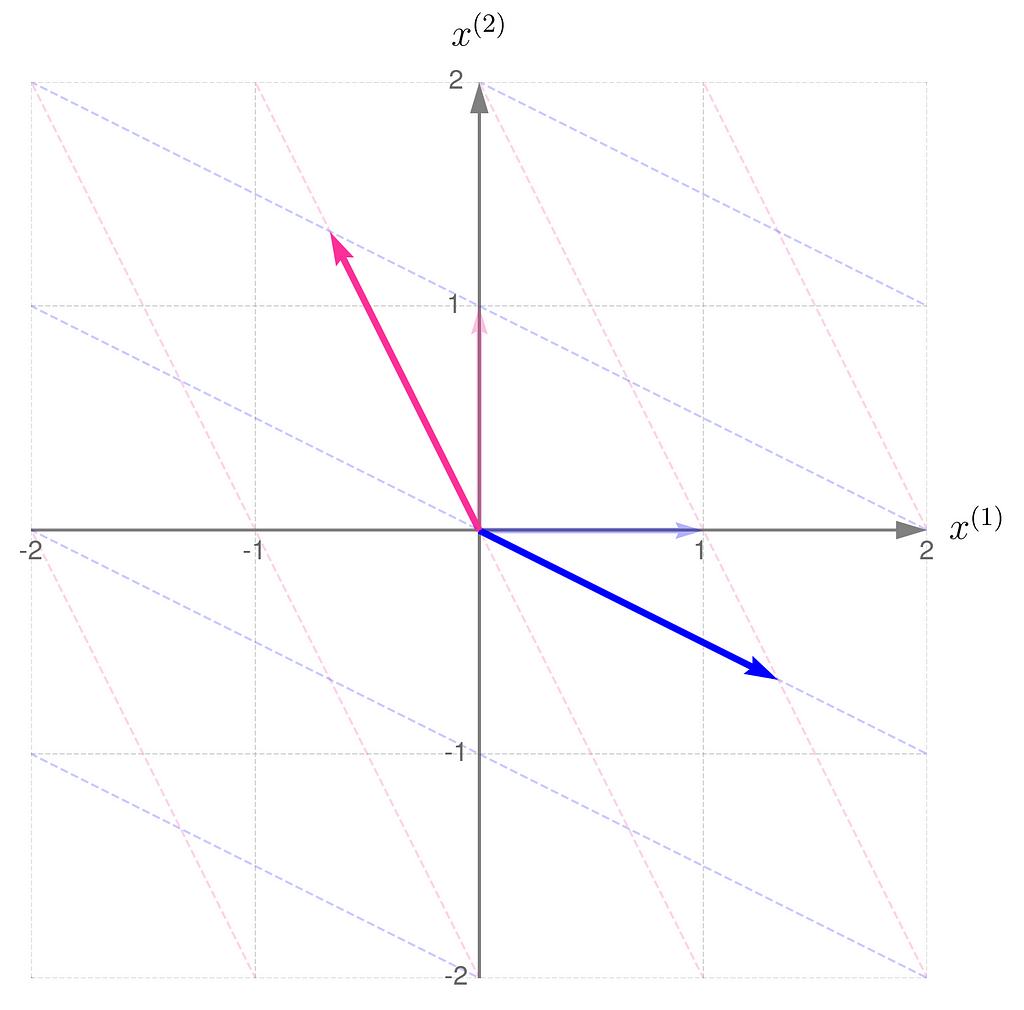
Compare the result with that obtained using B/2, which corresponds to dividing all elements of the matrix B by 2:
Grid lines transformed by matrix B/2
In general, a linear transformation:
ensures that straight lines remain straight,
keeps parallel lines parallel,
scales the distances between them by a uniform factor.
To keep things concise, I’ll use ‘transformation A‘ throughout the text instead of the full phrase ‘transformation represented by matrix A’.
Let’s return to the matrix
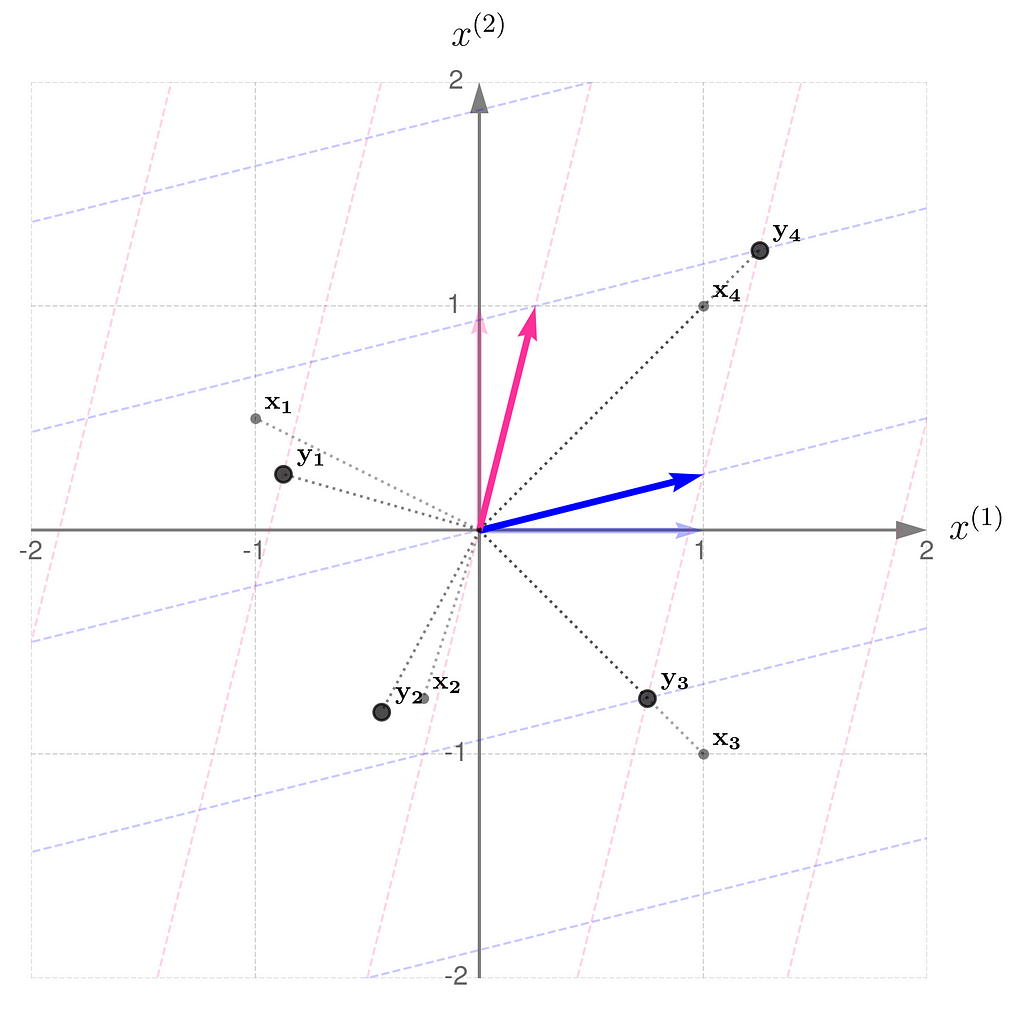
and apply the transformation to a few sample points.
The effects of transformation B on various input vectors
Notice the following:
point x₁ has been rotated counterclockwise and brought closer to the origin,
point x₂, on the other hand, has been rotated clockwise and pushed away from the origin,
point x₃ has only been scaled down, meaning it’s moved closer to the origin while keeping its direction,
point x₄ has undergone a similar transformation, but has been scaled up.
The transformation compresses in the x⁽¹⁾-direction and stretches in the x⁽²⁾-direction. You can think of the grid lines as behaving like an accordion.
Directions such as those represented by the vectors x₃ and x₄ play an important role in machine learning, but that’s a story for another time.
For now, we can call them eigen-directions, because vectors along these directions might only be scaled by the transformation, without being rotated. Every transformation, except for rotations, has its own set of eigen-directions.
4. Transposition
Recall that the transformation matrix is constructed by stacking the transformed basis vectors in columns. Perhaps you’d like to see what happens if we swap the rows and columns afterwards (the transposition).
Let us take, for example, the matrix
where Aᵀ stands for the transposed matrix.
From a geometric perspective, the coordinates of the first new basis vector come from the first coordinates of all the old basis vectors, the second from the second coordinates, and so on.
In NumPy, it’s as simple as that:
import numpy as np
A = np.array([ [1, -1], [1 , 1] ])
print(f'A transposed:n{A.T}')
A transposed: [[ 1 1] [-1 1]]
I must disappoint you now, as I cannot provide a simple rule that expresses the relationship between the transformations A and Aᵀ in just a few words.
Instead, let me show you a property shared by both the original and transposed transformations, which will come in handy later.
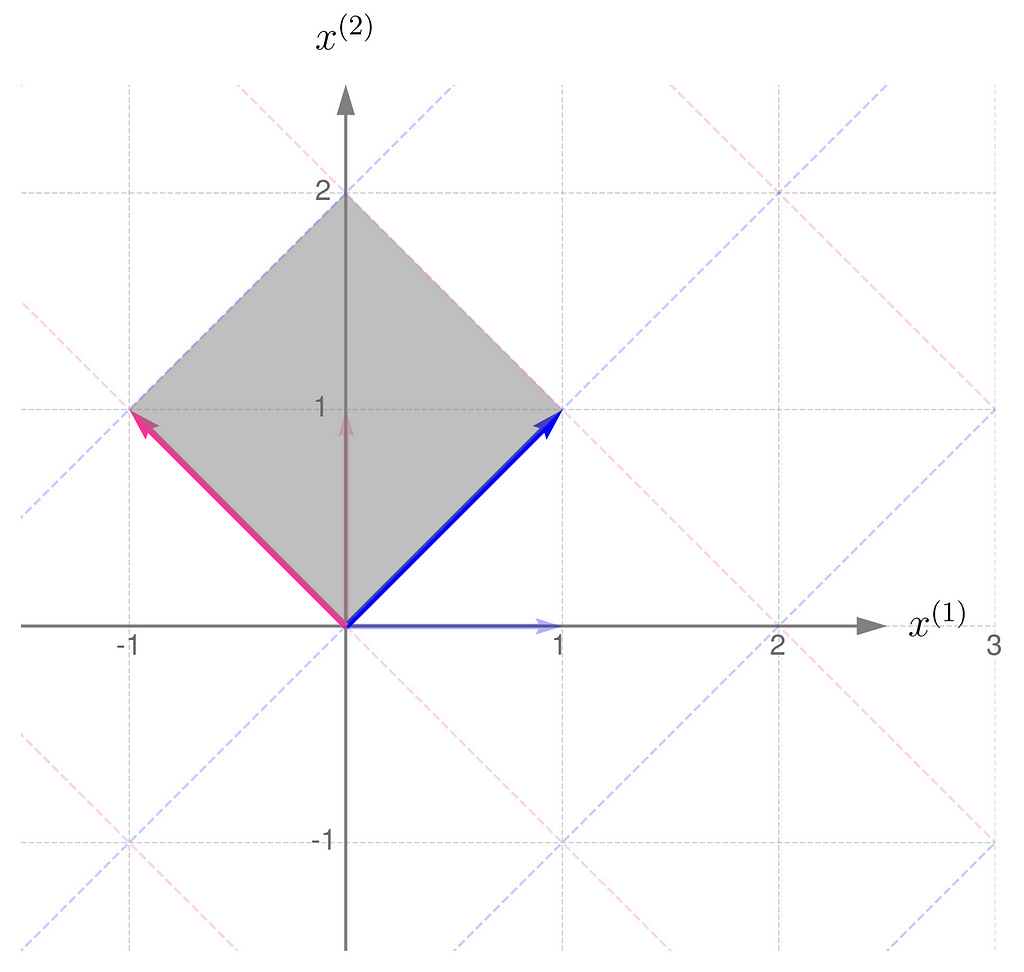
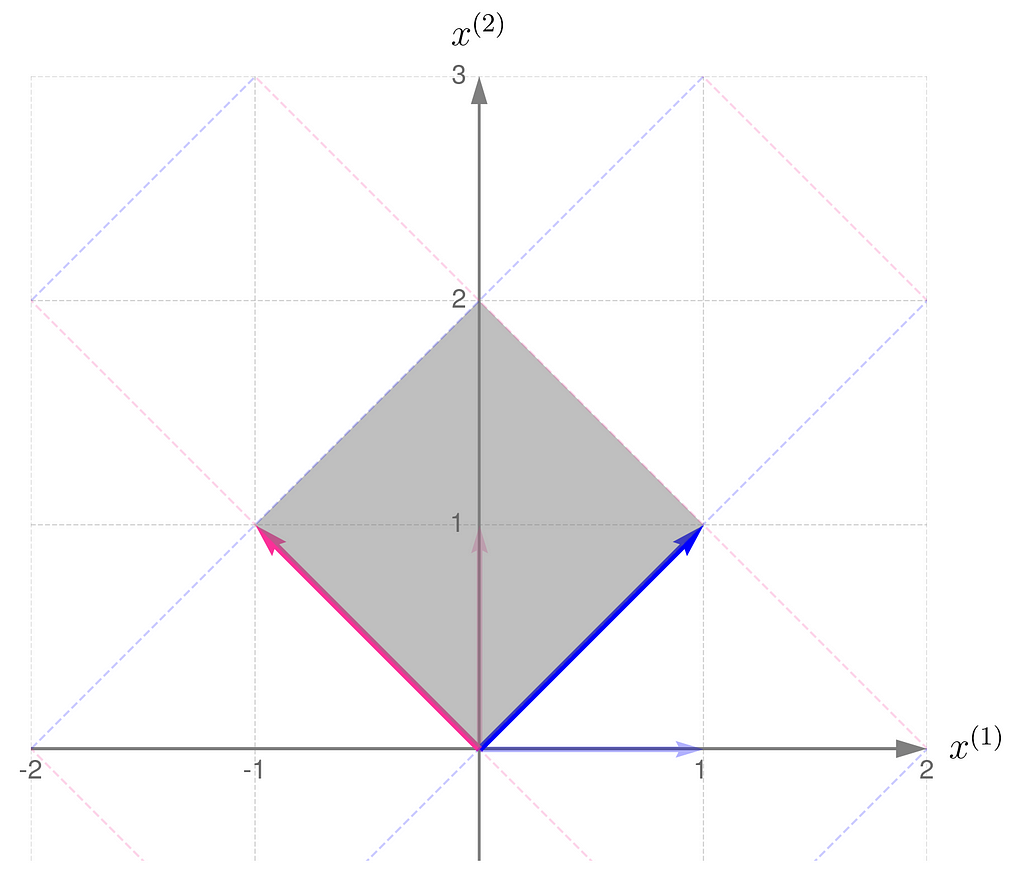
Here is the geometric interpretation of the transformation represented by the matrix A. The area shaded in gray is called the parallelogram.
Parallelogram spanned by the basis vectors transformed by matrix A
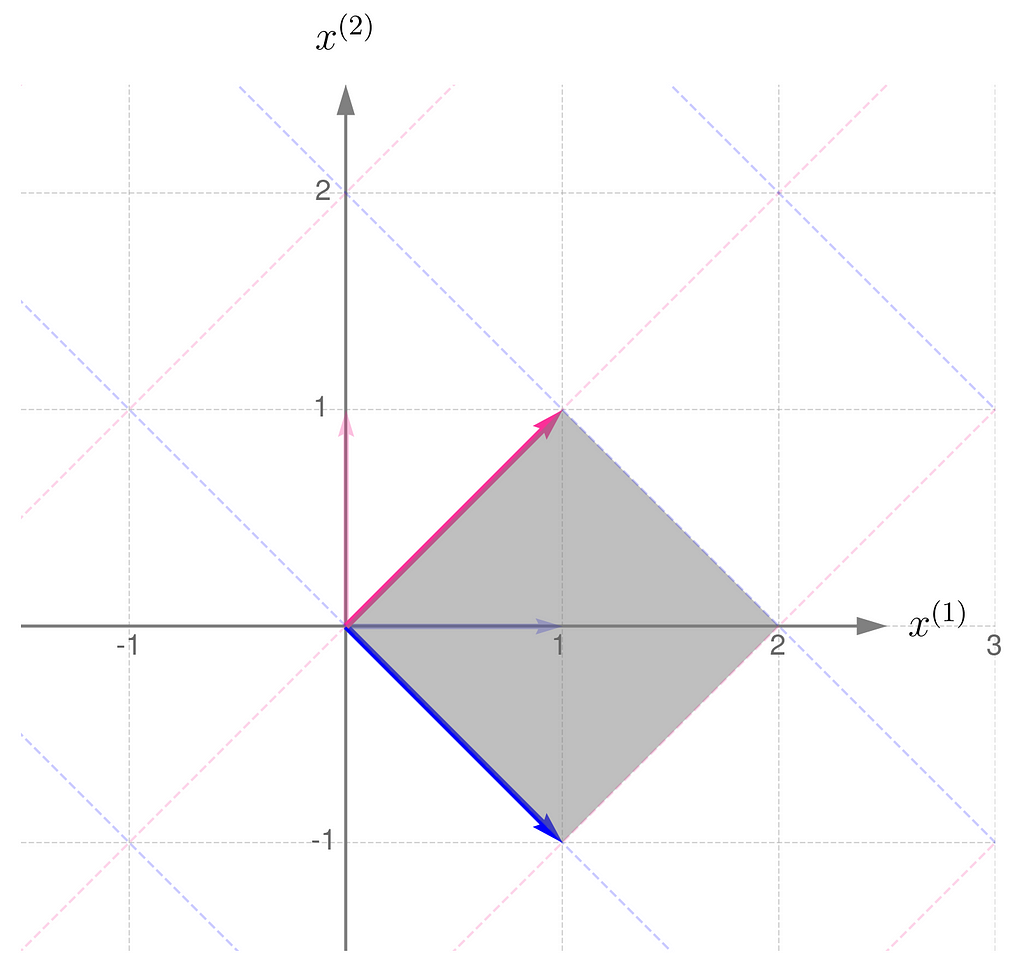
Compare this with the transformation obtained by applying the matrix Aᵀ:
Parallelogram spanned by the basis vectors transformed by matrix Aᵀ
Now, let us consider another transformation that applies entirely different scales to the unit vectors:
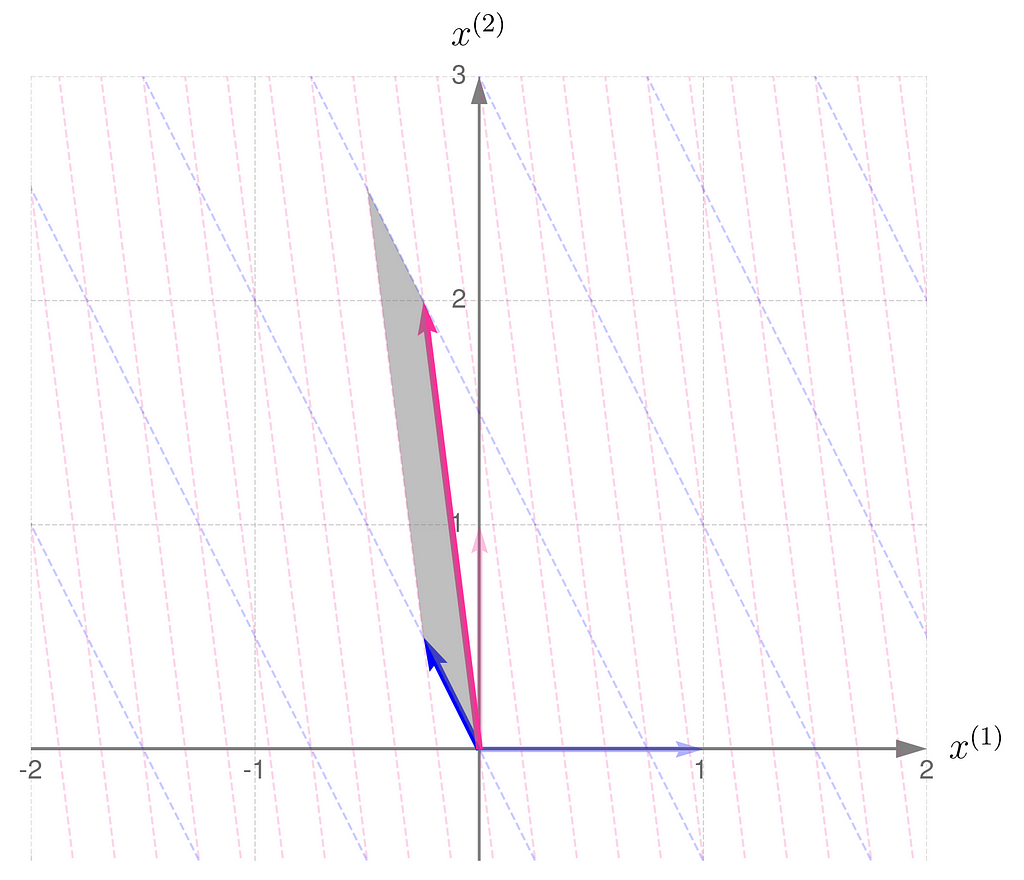
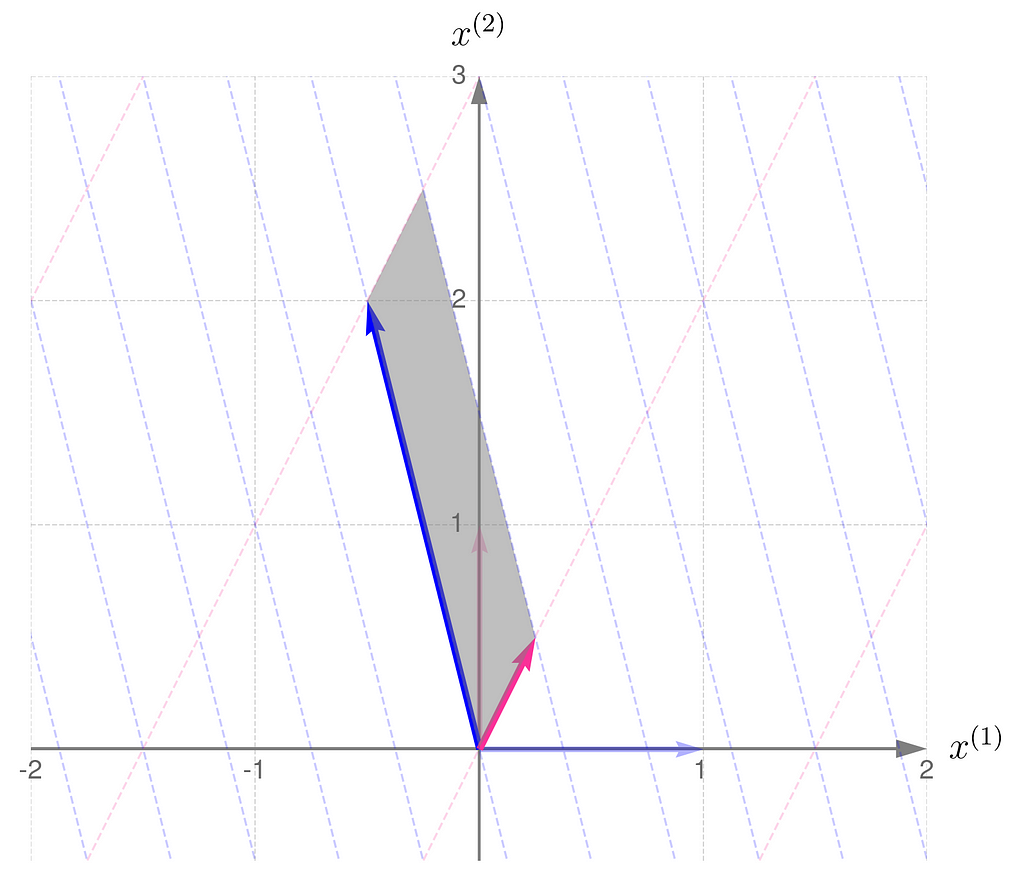
The parallelogram associated with the matrix B is much narrower now:
Parallelogram spanned by the basis vectors transformed by matrix B
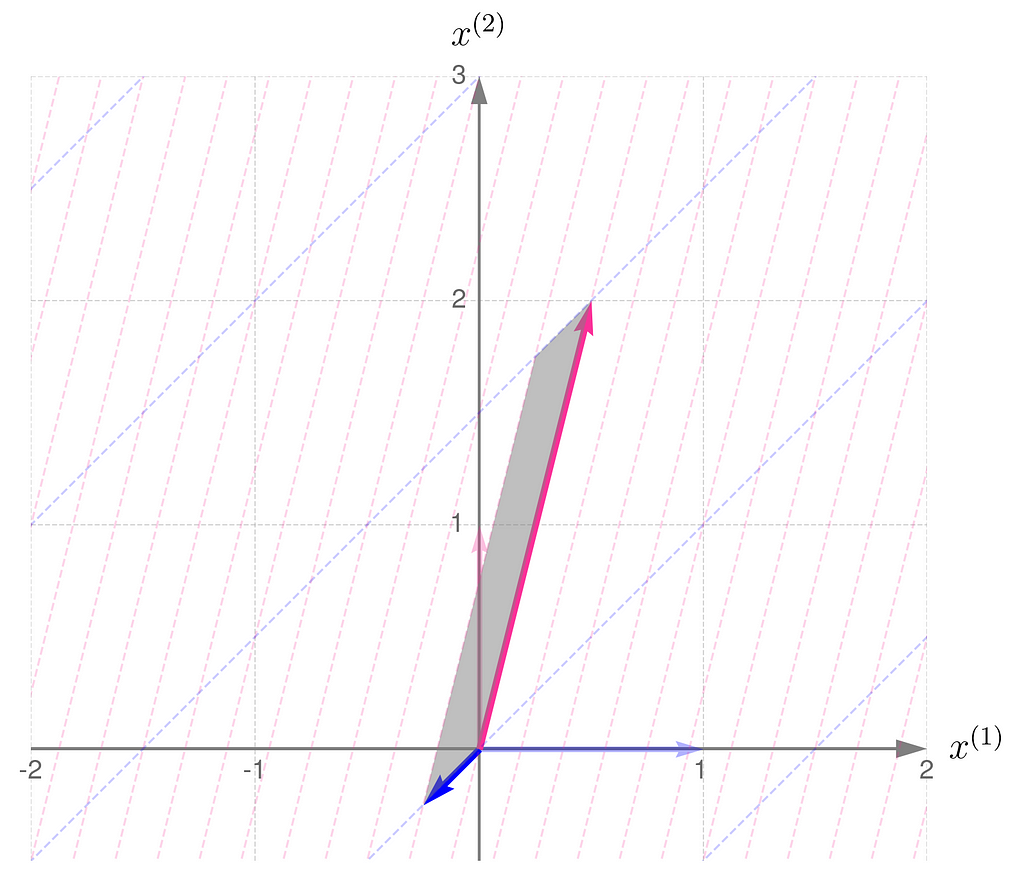
but it turns out that it is the same size as that for the matrix Bᵀ:
Parallelogram spanned by the basis vectors transformed by matrix Bᵀ
Let me put it this way: you have a set of numbers to assign to the components of your vectors. If you assign a larger number to one component, you’ll need to use smaller numbers for the others. In other words, the total length of the vectors that make up the parallelogram stays the same. I know this reasoning is a bit vague, so if you’re looking for more rigorous proofs, check the literature in the references section.
And here’s the kicker at the end of this section: the area of the parallelograms can be found by calculating the determinant of the matrix. What’s more, the determinant of the matrix and its transpose are identical.
More on the determinant in the upcoming sections.
5. Composition of transformations
You can apply a sequence of transformations — for example, start by applying A to the vector x, and then pass the result through B. This can be done by first multiplying the vector x by the matrix A, and then multiplying the result by the matrix B:
You can multiply the matrices B and A to obtain the matrix C for further use:
This is the effect of the transformation represented by the matrix C:
Transformation described by the composite matrix BA
You can perform the transformations in reverse order: first apply B, then apply A:
Let D represent the sequence of multiplications performed in this order:
And this is how it affects the grid lines:
Transformation described by the composite matrix AB
So, you can see for yourself that the order of matrix multiplication matters.
There’s a cool property with the transpose of a composite transformation. Check out what happens when we multiply A by B:
and then transpose the result, which means we’ll apply (AB)ᵀ:
You can easily extend this observation to the following rule:
To finish off this section, consider the inverse problem: is it possible to recover matrices A and B given only C = AB?
This is matrix factorization, which, as you might expect, doesn’t have a unique solution. Matrix factorization is a powerful technique that can provide insight into transformations, as they may be expressed as a composition of simpler, elementary transformations. But that’s a topic for another time.
6. Inverse transformation
You can easily construct a matrix representing a do-nothing transformation that leaves the standard basis vectors unchanged:
It is commonly referred to as the identity matrix.
Take a matrix A and consider the transformation that undoes its effects. The matrix representing this transformation is A⁻¹. Specifically, when applied after or before A, it yields the identity matrix I:
There are many resources that explain how to calculate the inverse by hand. I recommend learning Gauss-Jordan method because it involves simple row manipulations on the augmented matrix. At each step, you can swap two rows, rescale any row, or add to a selected row a weighted sum of the remaining rows.
Take the following matrix as an example for hand calculations:
You should get the inverse matrix:
Verify by hand that equation (4) holds. You can also do this in NumPy.
import numpy as np
A = np.array([ [1, -1], [1 , 1] ])
print(f'Inverse of A:n{np.linalg.inv(A)}')
Inverse of A: [[ 0.5 0.5] [-0.5 0.5]]
Take a look at how the two transformations differ in the illustrations below.
Transformation ATransformation A⁻¹
At first glance, it’s not obvious that one transformation reverses the effects of the other.
However, in these plots, you might notice a fascinating and far-reaching connection between the transformation and its inverse.
Take a close look at the first illustration, which shows the effect of transformation A on the basis vectors. The original unit vectors are depicted semi-transparently, while their transformed counterparts, resulting from multiplication by matrix A, are drawn clearly and solidly. Now, imagine that these newly drawn vectors are the basis vectors you use to describe the space, and you perceive the original space from their perspective. Then, the original basis vectors will appear smaller and, secondly, will be oriented towards the east. And this is exactly what the second illustration shows, demonstrating the effect of the transformation A⁻¹.
This is a preview of an upcoming topic I’ll cover in the next article about using matrices to represent different perspectives on data.
All of this sounds great, but there’s a catch: some transformations can’t be reversed.
7. Non-invertible transformations
The workhorse of the next experiment will be the matrix with 1s on the diagonal and b on the antidiagonal:
where b is a fraction in the interval (0, 1). This matrix is, by definition, symmetrical, as it happens to be identical to its own transpose: A=Aᵀ, but I’m just mentioning this by the way; it’s not particularly relevant here.
Invert this matrix using the Gauss-Jordan method, and you will get the following:
You can easily find online the rules for calculating the determinant of 2×2 matrices, which will give
This is no coincidence. In general, it holds that
Notice that when b = 0, the two matrices are identical. This is no surprise, as A reduces to the identity matrix I.
Things get tricky when b = 1, as the det(A) = 0 and det(A⁻¹) becomes infinite. As a result, A⁻¹ does not exist for a matrix A consisting entirely of 1s. In algebra classes, teachers often warn you about a zero determinant. However, when we consider where the matrix comes from, it becomes apparent that an infinite determinant can also occur, resulting in a fatal error. Anyway,
a zero determinant means the transformation is non-ivertible.
Now, the stage is set for experiments with different values of b. We’ve just seen how calculations fail at the limits, so let’s now visually investigate what happens as we carefully approach them.
We start with b = ½ and end up near 1.
Step 1)
Transformation ATransformation A⁻¹
Step 2)
Transformation ATransformation A⁻¹
Recall that the determinant of the matrix representing the transformation corresponds to the area of the parallelogram formed by the transformed basis vectors.
This is in line with the illustrations: the smaller the area of the parallelogram for transformation A, the larger it becomes for transformation A⁻¹. What follows is: the narrower the basis for transformation A, the wider it is for its inverse. Note also that I had to extend the range on the axes because the basis vectors for transformation A are getting longer.
By the way, notice that
the transformation A has the same eigen-directions as A⁻¹.
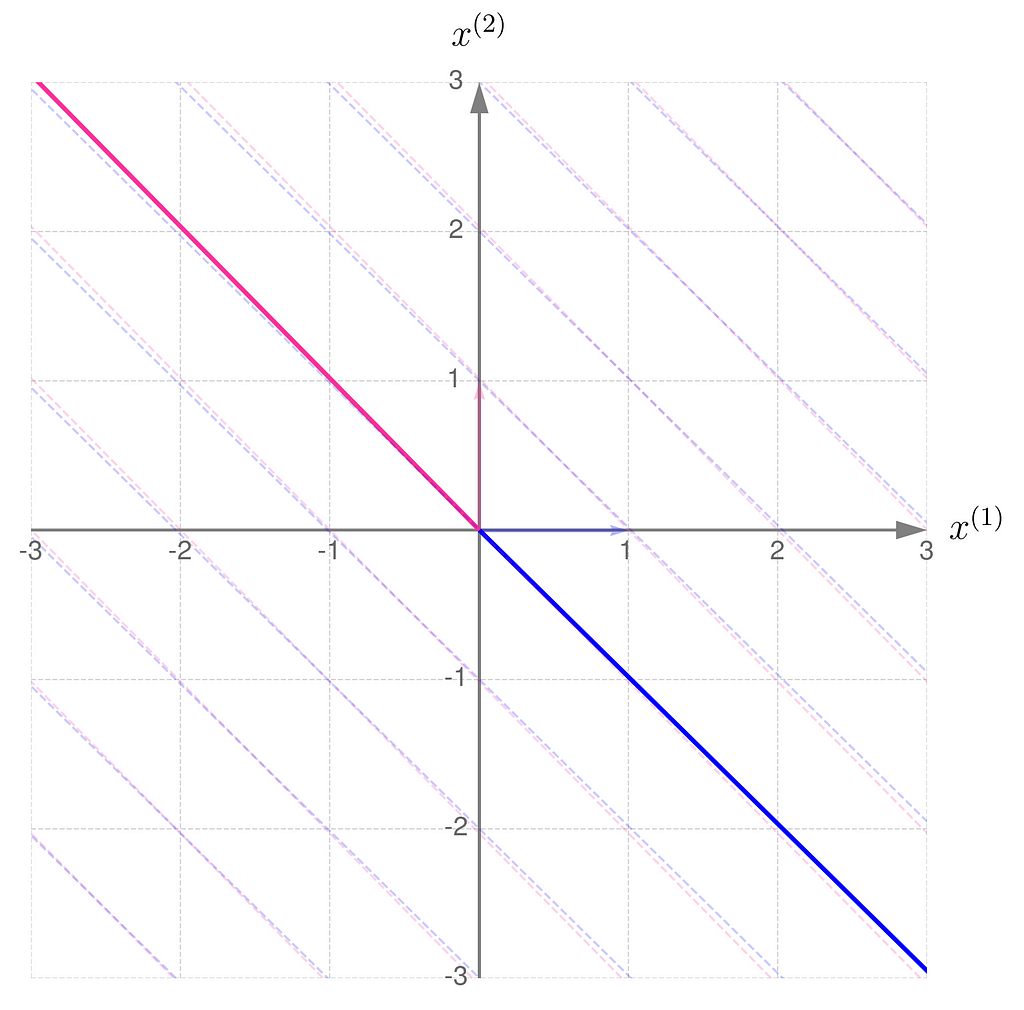
Step 3) Almost there…
Transformation ATransformation A⁻¹
The gridlines are squeezed so much that they almost overlap, which eventually happens when b hits 1. The basis vectors of are stretched so far that they go beyond the axis limits. When b reaches exactly 1, both basis vectors lie on the same line.
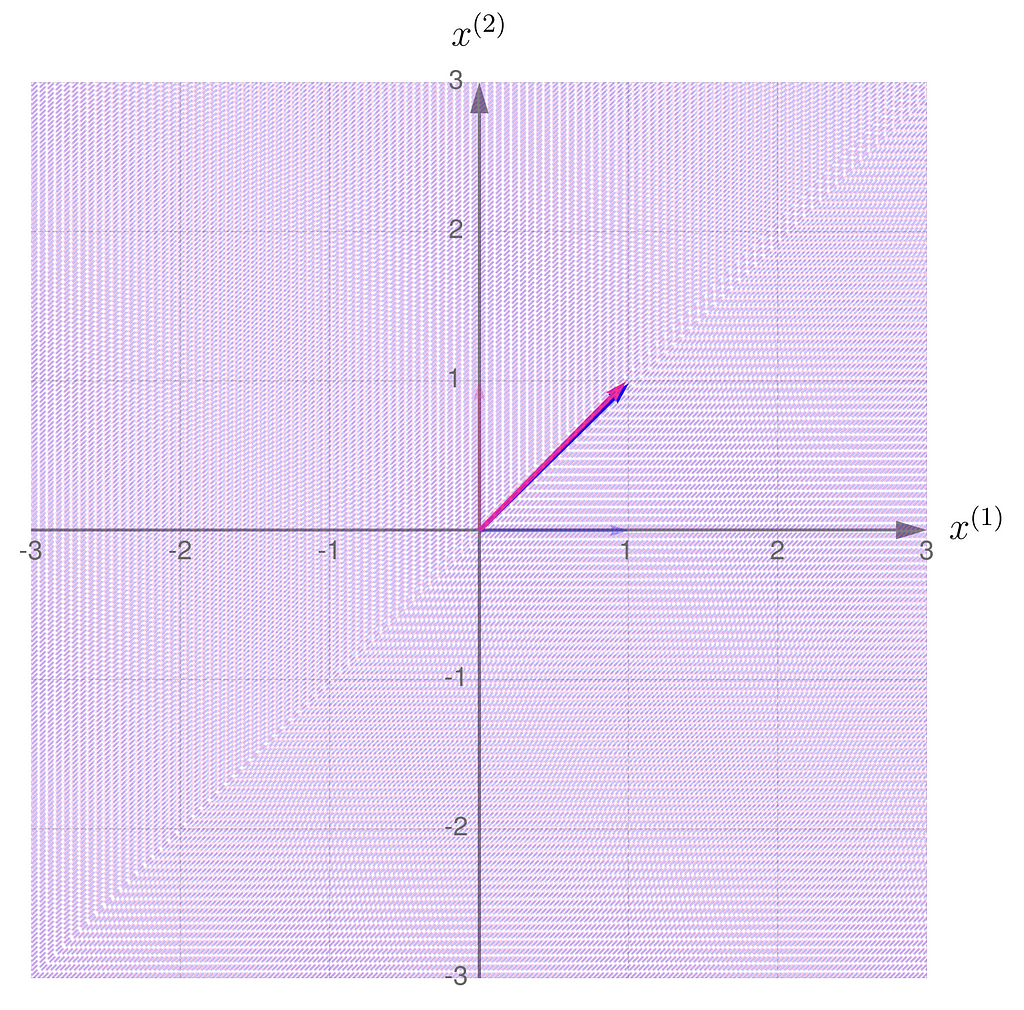
Having seen the previous illustrations, you’re now ready to guess the effect of applying a non-invertible transformation to the vectors. Take a moment to think it through first, then either try running a computational experiment or check out the results I’ve provided below.
.
.
.
Think of it this way.
When the basis vectors are not parallel, meaning they form an angle other than 0 or 180 degrees, you can use them to address any point on the entire plane (mathematicians say that the vectors span the plane). Otherwise, the entire plane can no longer be spanned, and only points along the line covered by the basis vectors can be addressed.
.
.
.
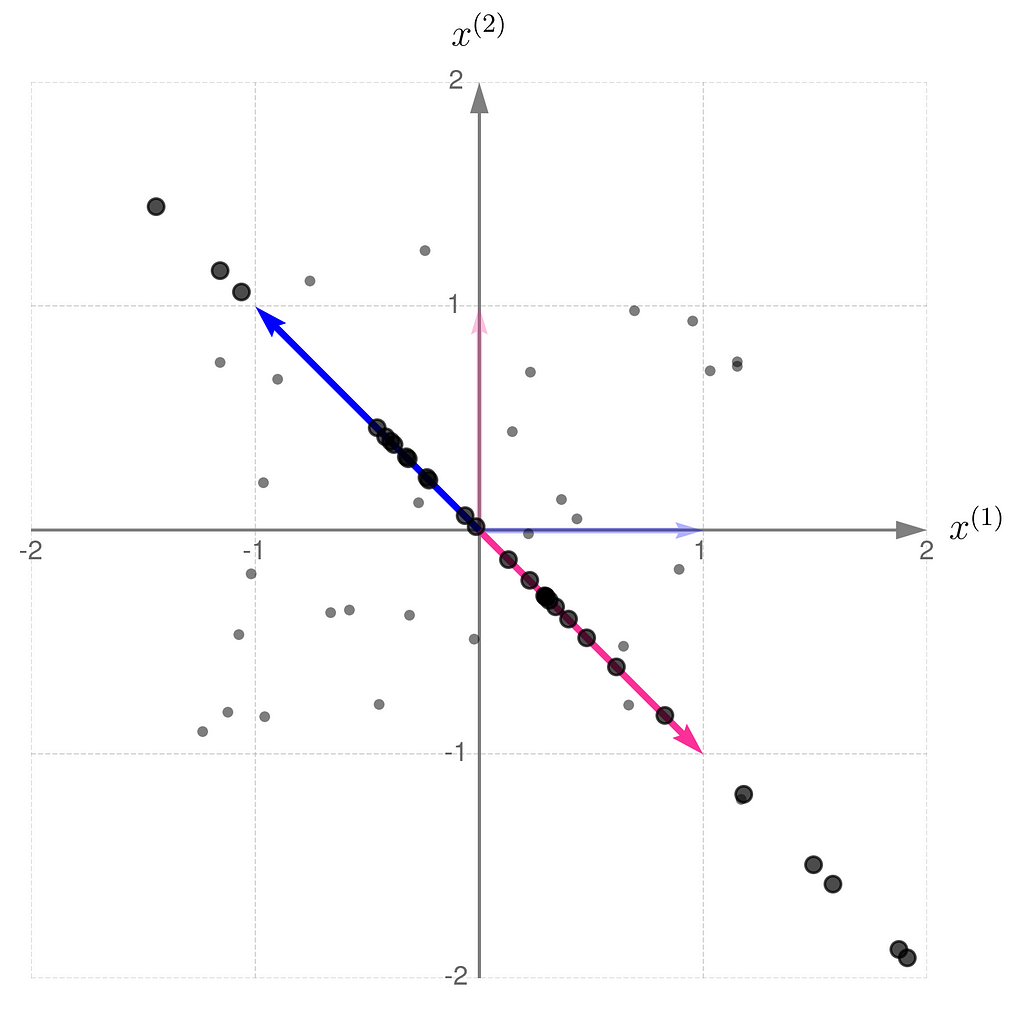
This is what it looks like when you apply the non-invertible transformation to randomly selected points:
A non-invertible matrix A reduces the dimensionality of the data
A consequence of applying a non-invertible transformation is that the two-dimensional space collapses to a one-dimensional subspace. After the transformation, it is no longer possible to uniquely recover the original coordinates of the points.
Take a look at the entries of matrix A. When b = 1, both columns (and rows) are identical, implying that the transformation matrix effectively behaves as if it were a 1 by 2 matrix, mapping two-dimensional vectors to a scalar.
You can easily verify that the problem would be the same if one row were a multiple of the other. This can be further generalized for matrices of any dimensions: if any row can be expressed as a weighted sum (linear combination) of the others, it implies that a dimension collapses. The reason is that such a vector lies within the space spanned by the other vectors, so it does not provide any additional ability to address points beyond those that can already be addressed. You may consider this vector redundant.
From section 4 on transposition, we can infer that if there are redundant rows, there must be an equal number of redundant columns.
8. Determinant
You might now ask if there’s a non-geometrical way to verify whether the columns or rows of the matrix are redundant.
Recall the parallelograms from Section 4 and the scalar quantity known as the determinant. I mentioned that
the determinant of a matrix indicates how the area of a unit parallelogram changes under the transformation.
The exact definition of the determinant is somewhat tricky, but as you’ve already seen, its graphical interpretation should not cause any problems.
I will demonstrate the behavior of two transformations represented by matrices:
det(A) = 2det(B) = -3/4
The magnitude of the determinant indicates how much the transformation stretches (if greater than 1) or shrinks (if less than 1) the space overall. While the transformation may stretch along one direction and compress along another, the overall effect is given by the value of the determinant.
Also, a negative determinant indicates a reflection; note that matrix B reverses the order of the basis vectors.
A parallelogram with zero area corresponds to a transformation that collapses a dimension, meaning the determinant can be used to test for redundancy in the basis vectors of a matrix.
Since the determinant measures the area of a parallelogram under a transformation, we can apply it to a sequence of transformations. If det(A) and det(B) represent the scaling factors of unit areas for transformations A and B, then the scaling factor for the unit area after applying both transformations sequentially, that is, AB, is equal to det(AB). As both transformations act independently and one after the other, the total effect is given by det(AB) = det(A) det(B). Substituting matrix A⁻¹ for matrix B and noting that det(I) = 1 leads to equation (5) introduced in the previous section.
Here’s how you can calculate the determinant using NumPy:
import numpy as np
A = np.array([ [-1/2, 1/4], [2, 1/2] ])
print(f'det(A) = {np.linalg.det(A)}')
det(A) = -0.75
9. Non-square matrices
Until now, we’ve focused on square matrices, and you’ve developed a geometric intuition of the transformations they represent. Now is a great time to expand these skills to matrices with any number of rows and columns.
Wide matrices
This is an example of a wide matrix, which has more columns than rows:
From the perspective of equation (1), y = Ax, it maps three-dimensional vectors x to two-dimensional vectors y.
In such a case, one column can always be expressed as a multiple of another or as a weighted sum of the others. For example, the third column here equals 3/4 times the first column plus 5/4 times the second.
Once the vector x has been transformed into y, it’s no longer possible to reconstruct the original x from y. We say that the transformation reduces the dimensionality of the input data. These types of transformations are very important in machine learning.
Sometimes, a wide matrix disguises itself as a square matrix, but you can reveal it by checking whether its determinant is zero. We’ve had this situation before, remember?
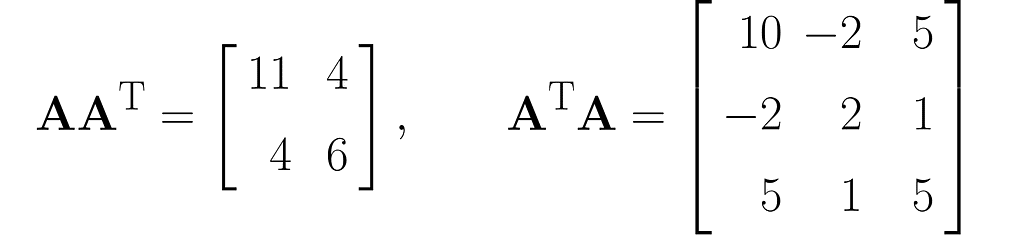
We can use the matrix A to create two different square matrices. Try deriving the following result yourself:
and also determinants (I recommend simplified formulas for working with 2×2 and 3×3 matrices):
The matrix AᵀA is composed of the dot products of all possible pairs of columns from matrix A, some of which are definitely redundant, thereby transferring this redundancy to AᵀA.
Matrix AAᵀ, on the other hand, contains only the dot products of the rows of matrix A, which are fewer in number than the columns. Therefore, the vectors that make up matrix AAᵀ are most likely (though not entirely guaranteed) linearly independent, meaning that one vector cannot be expressed as a multiple of another or as a weighted sum of the others.
What would happen if you insisted on determining x from y, which was previously computed as y = Ax? You could left-multiply both sides by A⁻¹ to get equation A⁻¹y = A⁻¹Ax and, since A⁻¹A = I, obtain x = A⁻¹y. But this would fail from the very beginning, because matrix A⁻¹, being non-square, is certainly non-invertible (at least not in the sense that was previously introduced).
However, you can extend the original equation y = Ax to include a square matrix where it’s needed. You just need to left-multiply matrix Aᵀ on both sides of the equation, yielding Aᵀy = AᵀAx. On the right, we now have a square matrix AᵀA. Unfortunately, we’ve already seen that its determinant is zero, so it appears that we have once again failed to reconstruct x from y.
Tall matrices
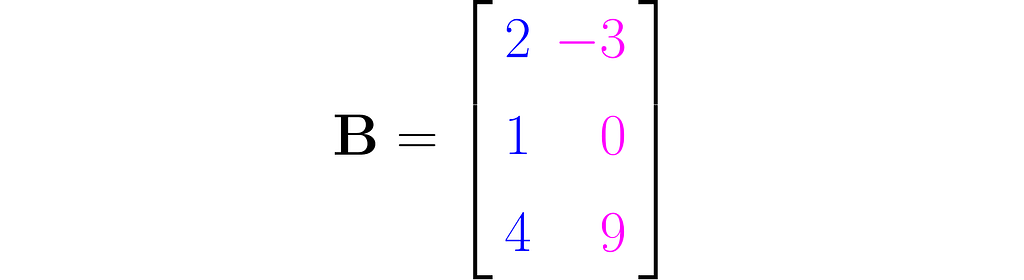
Here is an example of a tall matrix
that maps two-dimensional vectors x into three-dimensional vectors y. I made a third row by simply squaring the entries of the first row. While this type of extension doesn’t add any new information to the data, it can surprisingly improve the performance of certain machine learning models.
You might think that, unlike wide matrices, tall matrices allow the reconstruction of the original x from y, where y = Bx, since no information is discarded — only added.
And you’d be right! Look at what happens when we left-multiply by matrix Bᵀ, just like we tried before, but without success: Bᵀy = BᵀBx. This time, matrix BᵀB is invertible, so we can left-multiply by its inverse:
(BᵀB)⁻¹Bᵀy = (BᵀB)⁻¹(BᵀB)x
and finally obtain:
This is how it works in Python:
import numpy as np
# Tall matrix B = [ [2, -3], [1 , 0], [3, -3] ]
# Convert to numpy array B = np.array(B)
# A column vector from a lower-dimensional space x = np.array([-3,1]).reshape(2,-1)
# Calculate its corresponding vector in a higher-dimensional space y = B @ x
reconstructed_x = np.linalg.inv(B.T @ B) @ B.T @ y
print(reconstructed_x)
[[-3.] [ 1.]]
To summarize: the determinant measures the redundancy (or linear independence) of the columns and rows of a matrix. However, it only makes sense when applied to square matrices. Non-square matrices represent transformations between spaces of different dimensions and necessarily have linearly dependent columns or rows. If the target dimension is higher than the input dimension, it’s possible to reconstruct lower-dimensional vectors from higher-dimensional ones.
10. Inverse and Transpose: similarities and differences
You’ve certainly noticed that the inverse and transpose operations play a key role in matrix algebra. In this section, we bring together the most useful identities related to these operations.
Whenever I apply the inverse operator, I assume that the matrix being operated on is square.
We’ll start with the obvious one that hasn’t appeared yet.
Here are the previously given identities (2) and (5), placed side by side:
Let’s walk through the following reasoning, starting with the identity from equation (4), where A is replaced by the composite AB:
The parentheses on the right are not needed. After removing them, I right-multiply both sides by the matrix B⁻¹ and then by A⁻¹.
Thus, we observe the next similarity between inversion and transposition (see equation (3)):
You might be disappointed now, as the following only applies to transposition.
But imagine if A and B were scalars. The same for the inverse would be a mathematical scandal!
For a change, the identity in equation (4) works only for the inverse:
I’ll finish off this section by discussing the interplay between inversion and transposition.
From the last equation, along with equation (3), we get the following:
Keep in mind that Iᵀ = I. Right-multiplying by the inverse of Aᵀ yields the following identity:
11. Translation by a vector
You might be wondering why I’m focusing only on the operation of multiplying a vector by a matrix, while neglecting the translation of a vector by adding another vector.
One reason is purely mathematical. Linear operations offer significant advantages, such as ease of transformation, simplicity of expressions, and algorithmic efficiency.
A key property of linear operations is that a linear combination of inputs leads to a linear combination of outputs:
where α, β are real scalars, and Lin represents a linear operation.
Let’s first examine the matrix-vector multiplication operator Lin[x] = Ax from equation (1):
This confirms that matrix-vector multiplication is a linear operation.
Now, let’s consider a more general transformation, which involves a shift by a vector b:
Plug in a weighted sum and see what comes out.
You can see that adding b disrupts the linearity. Operations like this are called affine to differentiate them from linear ones.
Don’t worry though — there’s a simple way to eliminate the need for translation. Simply shift the data beforehand, for example, by centering it, so that the vector b becomes zero. This is a common approach in data science.
Therefore, the data scientist only needs to worry about matrix-vector multiplication.
12. Final words
I hope that linear algebra seems easier to understand now, and that you’ve got a sense of how interesting it can be.
If I’ve sparked your interest in learning more, that’s great! But even if it’s just that you feel more confident with the course material, that’s still a win.
Bear in mind that this is more of a semi-formal introduction to the subject. For more rigorous definitions and proofs, you might need to look at specialised literature.
Unless otherwise noted, all images are by the author
References
[1] Gilbert Strang. Introduction to linear algebra. Wellesley-Cambridge Press, 2022.
[2] Marc Peter Deisenroth, A. Aldo Faisal, Cheng Soon Ong. Mathematics for machine learning. Cambridge University Press, 2020.
Surveying and improving the current methodologies for customer profiling
***To understand this article, knowledge of embeddings, clustering, and recommendation systems is required. The implementation of this algorithm has been released on GitHub and is fully open-source. I am open to criticism and welcome any feedback.
Most platforms, nowadays, understand that tailoring individual choices for each customer leads to increased user engagement. Because of this, the recommender systems’ domain has been constantly evolving, witnessing the birth of new algorithms every year.
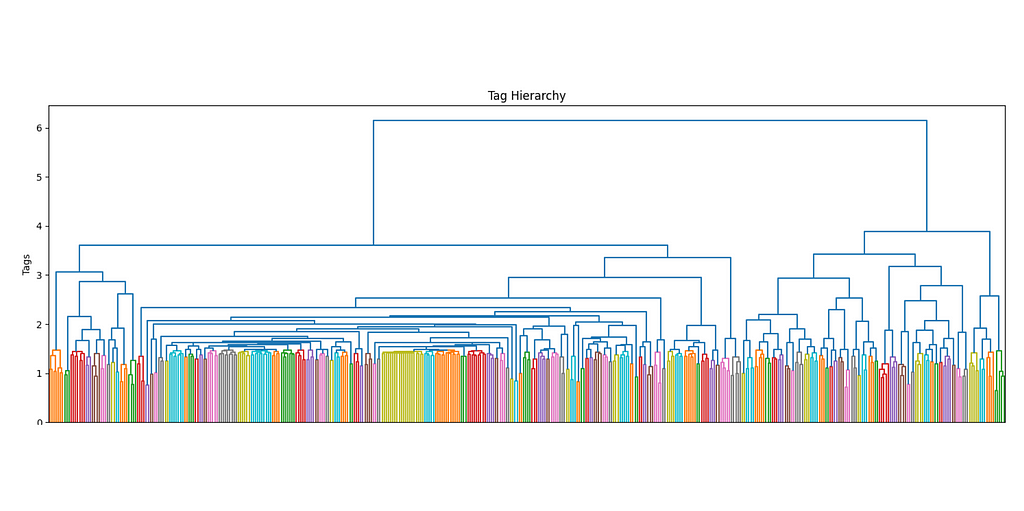
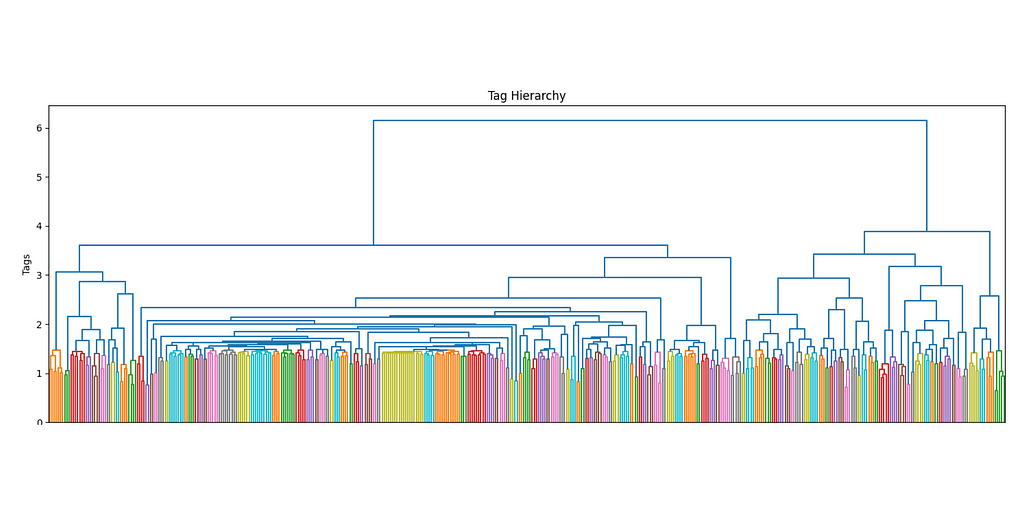
hierarchical clustering, image by Author
Unfortunately, no existing taxonomy is keeping track of all algorithms in this domain. While most recommendation algorithms, such as matrix factorization, employ a neural network to make recommendations based on a list of choices, in this article, I will focus on the ones that employ a vector-based architecture to keep track of user preferences.
Exemplar Recommenders
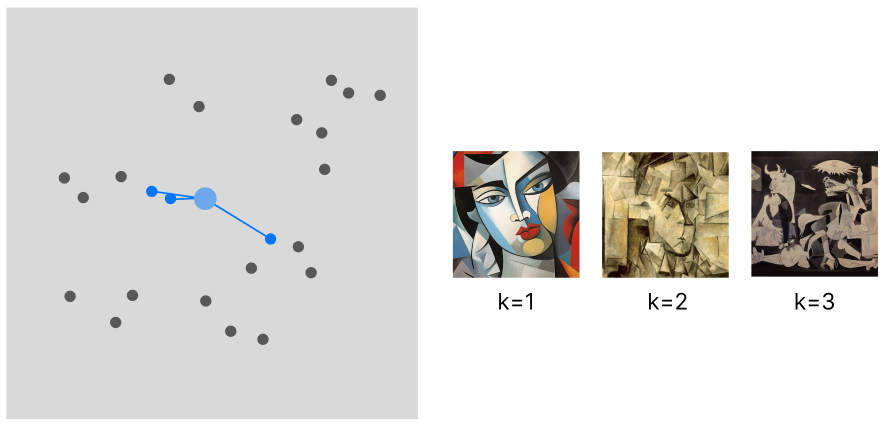
Thanks to the simplicity of embeddings, each sample that can be recommended (ex. products, content…) is converted into a vector using a pre-trained neural network (for example a matrix factorization): we can then use knn to make recommendations of similar products/customers. The algorithms following this paradigm are known as vector-based recommender systems. However, when these models take into consideration the previous user choices, they add a sequential layer to their base architecture and become technically known as vector-basedsequential recommenders. Because these architectures are becoming increasingly difficult (to both remember and pronounce), I am calling them exemplar recommenders: they extract a set of representative vectors from an initial set of choices to represent a user vector.
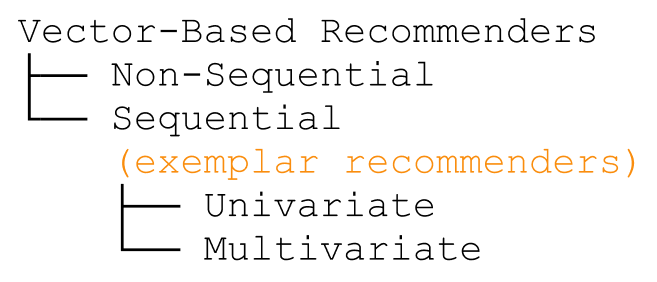
subdivision of recommender systems, image by Author
One of the first systems built on top of this architecture is Pinterest, which is running on top of its Pinnersage Recommendation engine: this scaled engine capable of managing over 2 Billion pins runs its own specific architecture and performs clustering on the choices of each individual user. As we can imagine, this represents a computational challenge when scaled. Especially after discovering covariate encoding, I would like to introduce four complementary architectures (two in particular, with the article’s name) that can relieve the stress of clustering algorithms when trying to profile each customer. You can refer to the following diagram to differentiate between them.
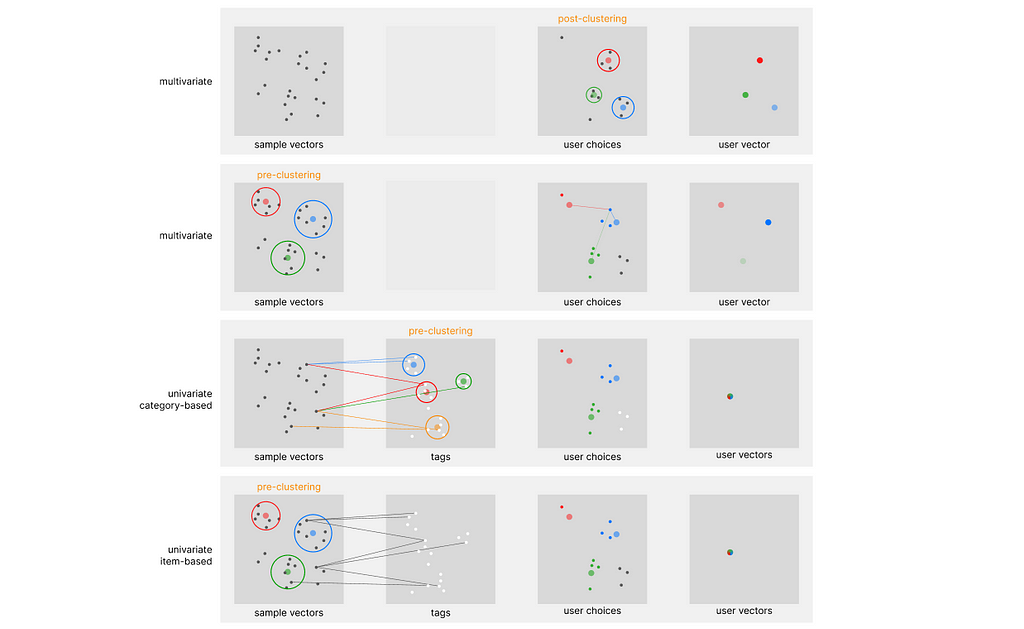
summary of exemplar recommenders, image by Author
Note that all the above approaches are classified as content-based filtering, and not collaborative filtering. In regards to the exemplar architecture, we can identify two main defining parameters: in-stack clustering implementation (we either perform clustering on the sample embedding or directly on the user embedding), and the number of vectors used to store user preferences over time.
In-Stack Clustering implementation
Using once again Pinnersage as an example, we can see how it performs a novel clustering iter for each user. However advantageous from an accuracy perspective, this is computationally very heavy.
Post-Clustering
When clustering is used on top of the user embeddings, we can refer to this approach (in this specific stack) as post-clustering. However inefficient this may look, applying a non-parametric clustering algorithm on billions of samples is borderline impossible, and probably not the best option.
Pre-Clustering
There might be some use cases when applying clustering on top of the sample data could be advantageous: we can refer to this approach (in this specific stack) as pre-clustering. For example, a retail store may need to track the history of millions of users, requiring the same computational resources of the Pinnersage architecture.
However, the number of samples of a retail store, compared to the Pinterest platform, should not exceed 10.000, against the staggering 2 Billion in comparison. With such a small number of samples, performing clustering on the sample embedding is very efficient, and will relieve the need to use it on the user embedding, if utilized properly.
Introducing the Univariate Architecture
As mentioned, the biggest challenge when creating these architectures is scalability. Each user amounts to hundreds of past choices held in record that need to be computed for exemplar extraction.
Multivariate architecture
The most common way of building a vector-based recommender is to pin every user choice to an existing pre-computed vector. However, even if we resort to decay functions to minimize the number of vectors to take into account for our calculation, we still need to fill the cache with all the vectors at the time of our computation. In addition, at the time of retrieval, the vectors cannot be stored on the machine that performs the calculation, but need to be queried from a database: this sets an additional challenge for scalability.
The flow of this approach is the limited variance in recommendations. The recommended samples will be spatially very close to each other (the sample variance is minimized) and will only belong to the same category (unless there is in place a more complex logic defining this interaction).
multivariate exemplar recommendation, image by Author
WHEN TO USE: This approach (I am only taking into account the behavior of the model, not its computational needs) is suited for applications where we can recommend a batch of samples all from the same category. Art or social media applications are one example.
Univariate architecture
With this novel approach, we can store each user choice using a single vector that keeps updating over time. This should prove to be a remarkable improvement in scalability, minimizing the computational stress derived from both knn and retrieval.
To make it even more complicated, there are two indexes where we can perform clustering. We can either cluster the items or the categories (both labeled using tags). There is no superior approach, we have to choose one depending on our use case.
> category-based
This article is entirely based on the construction of a category-based model. After tagging our data we can perform a clustering to group our data into a hierarchy of categories (in case our data is already organized into categories, there is no need to apply hierarchical clustering).
The main advantage of this approach is that the exemplar indicating the user preferences will be linked to similar categories (increasing product variance).
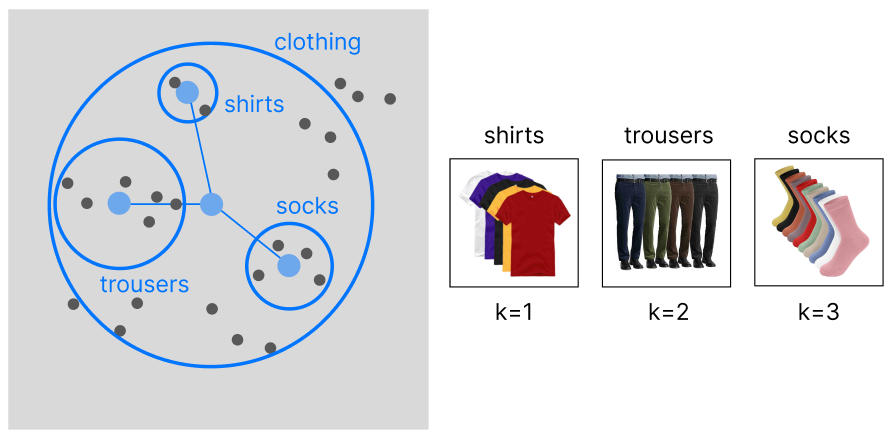
univariate category-based exemplar recommendation, image by Author
WHEN TO USE: Sometimes, we want to focus on recommending an entire category to our customers, rather than individual products. For example, if our user enjoys buying shirts (and by chance the exemplar is located in the latent region of red shirts), we would benefit more from recommending him the entire clothing category, rather than only red shirts. This approach is best suited for retail and fashion companies.
> item-based
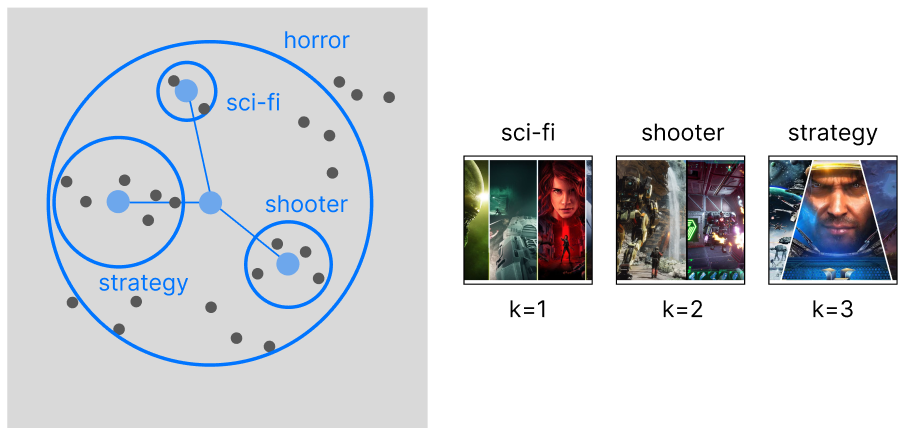
With an item-based approach, we are performing clustering on top of our samples. This will allow us to capture more granular information on the data, rather than focusing on separated categories: we want to expand beyond the limitations of the product categorization and recommend items across existing categories.
univariate item-based exemplar recommendation, image by Author
WHEN TO USE: The best companies that can make the best use for this approach are human resources and retailers with cross-categorical products (ex. videogames).
Univariate Exemplar Recommenders
Finally, we can explain in depth the architecture behind the category-based approach. This algorithm will perform exemplar extraction by only storing a single vector over time: the only technology capable of managing it is covariate encoding, hence we will use tags on top of the data. Because it uses pre-clustering, it is ideal for use cases with a manageable number of samples, but an unlimited number of users.
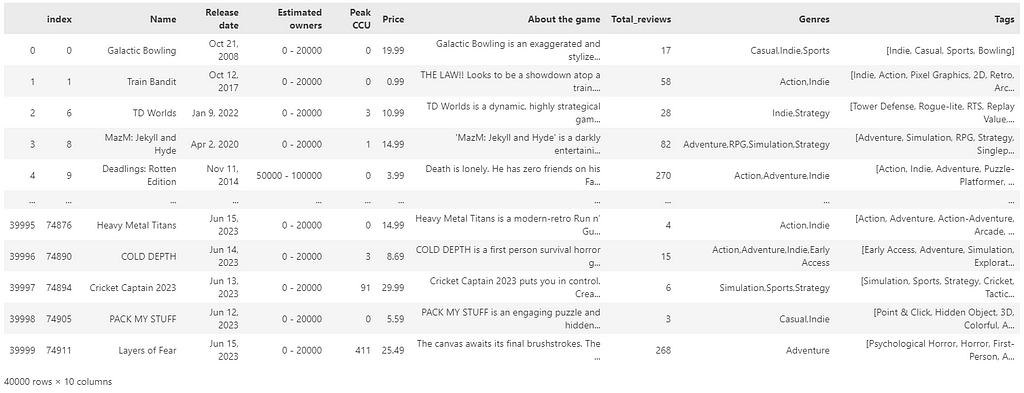
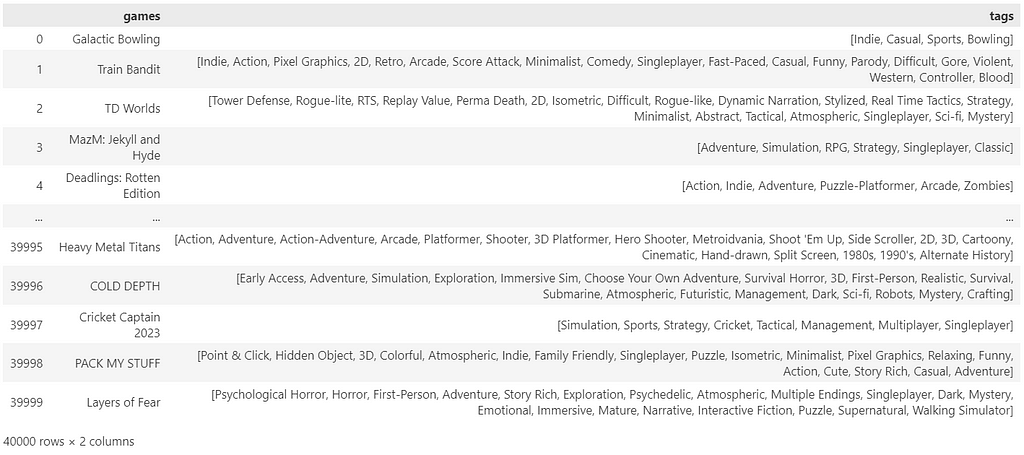
For this example, I will be using the open-source collection of the Steam game library (downloadable from Kaggle — MIT License), which is a perfect use case for this recommender at scale: Steam uses no more than 450 tags, and the number can occasionally increase over time; yet, it is manageable. This set of tags can be clustered very easily, and can even allow for manual intervention if we question the cluster assignment. Last, it serves millions of users, proving to be a realistic use case for our recommender.
Sample of the Steam game dataset, image by Author
Its architecture can be articulated into the following phases: ***Note that when creating the sample code of this architecture I am using LLMs to make the entire process free from any human supervision. However, LLMs remain optional, and while they may improve the level of this recommender system, they are not an essential part of it.
Sample Labeling We need to make sure to assign tags to each of our samples. Because of semantic tag filtering, we do not need to resort to zero-shots, but we can let a LLM manage this process without any supervision.
Pre-Clustering We are going to divide the tag embedding into different clusters. For a higher level of accuracy, we are going to use hierarchical clustering with a depth of 3.
Cluster labeling Once we have defined our cluster tree, we need to label each generated supercluster. We can still use LLM for this purpose. If you decide to avoid using LLMs, not that clusters can remain in a numerical form (this may only alter the user perception of the recommender).
Balance non-uniform tag frequency The first challenge in picking from a list of tags is that the tags that appear the most (and are assigned to one cluster), heavily skew the recommender to propose that very cluster. We need to make sure that each cluster has the same probability of being recommended. We can achieve this by adding a custom multiplier that uniforms the probability of each cluster being recommended.
Univariate sequential encoding Now that our encoding weights have been defined, we can encode the user history in a vector, but with the possibility of updating it over time (using a decay function to get rid of old user preferences).
Account for scalability: pruning mechanism Because the dimensions of our vector are equivalent to the number of tags, we need to find a way to limit the size of the vector over time. PCA is a valid option, but because of the sum operations on the vector, feature pruning has proved to be more efficient.
Exemplar estimation This is where the innovation lies. We can encode the user profile as a single exemplar and still obtain separate cluster recommendations without any information loss that would arise IF we were to average multiple exemplars. This means that each of the previous multivariate methods would be incompatible with this architecture.
Let us begin with the full explanation behind the Univariate Exemplar Recommender:
1. Sample Labeling
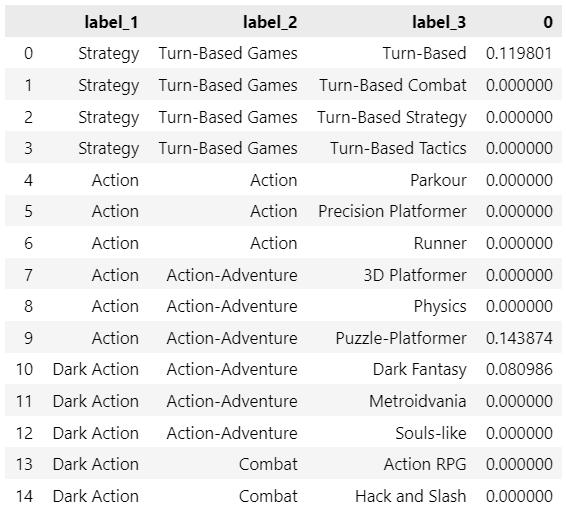
In our reference dataset all samples have already been labeled using tags. If by any chance we are working with labeled data, we can easily do that using a LLM, prompting a request for a list of tags for each sample. As explained in my article on semantic tag filtering, we do not need to use zero-shots to guide the choice of labels, and the process can be completely unsupervised.
Screenshot of our sample data, each sample labeled with tags, image by Author
2. Pre-Clustering
As mentioned, the idea behind this recommender is to first organize the data into clusters, and then identify the most common clusters (exemplars) that define the preferences of every single user. Because the data is ideally very small (thousands of tags against billions of samples), clustering is no longer a burden and can be done on the tag embedding, rather than on the millions of user embeddings.
The more the number of tags increases, the more it makes sense to use a hierarchical structure to manage its complexity. Ideally, I would want not only to keep track of the main interests of each user but also their sub-interests and make recommendations accordingly. By using a dendrogram, we can define the different levels of clusters by using a threshold level.
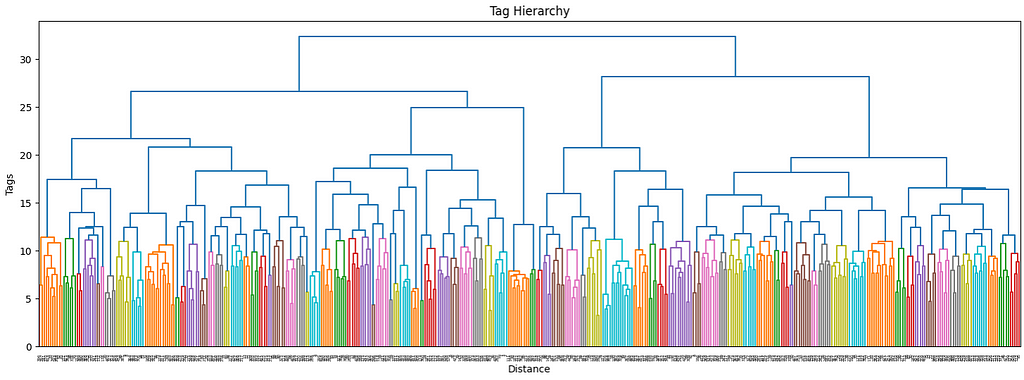
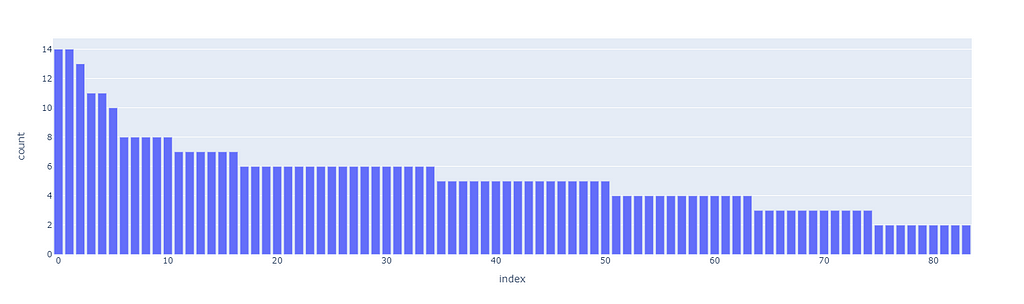
The first superclusters (level 1) will be the result of using a threshold of 11.4, resulting in the first 81 clusters. We can also see how their distribution is non-uniform (some clusters are bigger than others), but all considered, is not excessively skewed.
hierarchical clustering, level 1, threshold=11.4, image by Authorall the cluster sizes of level 1 clustering, image by Author
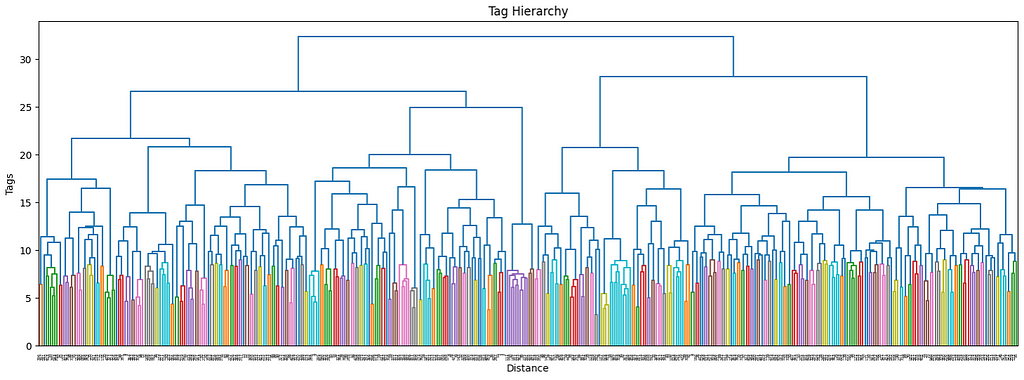
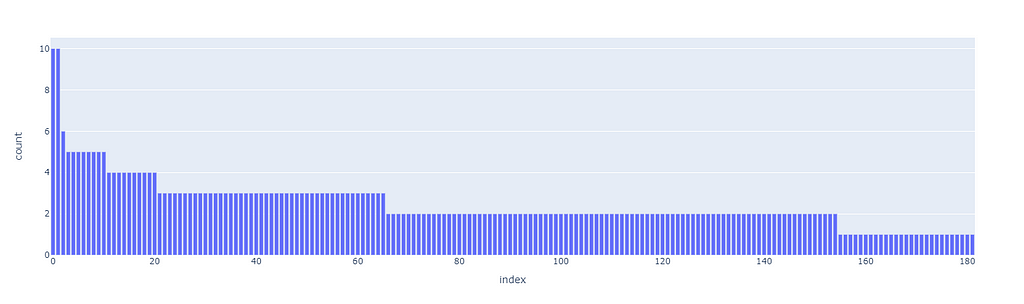
The next clustering level will be defined by a smaller threshold (9), which organizes the data in 181 clusters. Equivalently for the first level of clustering, the size distribution is uneven, but there are only two big clusters, so it should not be this big of an issue.
hierarchical clustering, level 2, threshold=9, image by Authorall the cluster sizes of level 2 clustering, image by Author
These thresholds have been arbitrarily chosen. Although there are non-parametric clustering algorithms that can perform the clustering process without any human input, they are quite challenging to manage, especially at scale, and show side effects such as the non-uniform distribution of cluster sizes. If among our clusters there are some that are too big (ex. one single cluster may even account for 20% of the overall data), then they may incorporate most recommendations without much sense.
Our priority when executing clustering is to obtain the most uniform distribution while maximizing the number of clusters so that the data can be split and differently represented as much as possible.
3. Cluster labeling
Because we have chosen to perform clustering on two levels of depths on top of our existing data, we have reached a total of 3 layers. The last layer is made by individual labels and is the only labeled layer. The other two, instead, only hold the cluster number without proper naming.
To solve this problem (note that this supercluster labeling step is not mandatory, but can improve how the user interacts with our recommender) we can use LLM on top of the superclusters. Let us try to automatically label all our clusters by feeding the tags inside of each group:
labeling for clusters at different depths, image by Author
Now that also our clusters have been labeled correctly, we can start building the foundation of our sequential recommender.
4. Balance non-uniform tag frequency
So far, we have completed the easy part. Now that we have all our elements ready to create a recommender, we still need to adjust the imbalances. It would be much more intuitive to showcase this step after the recommender is done, but, unfortunately, it is part of its base structure, you will need to bear this with me.
4.1 What if we skip balancing?
Let us, for a moment, skip ahead of time, and show the capabilities of our finished recommender by simply skipping this essential step. By assigning a score of 1 to each tag, there will be some tags that are so common that they will heavily skew the recommendation scores.
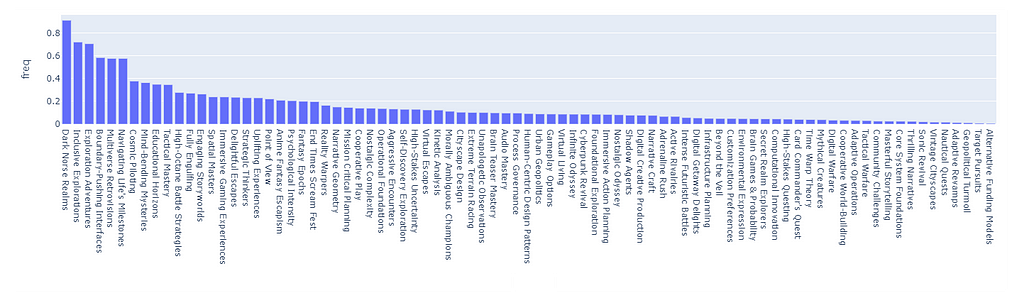
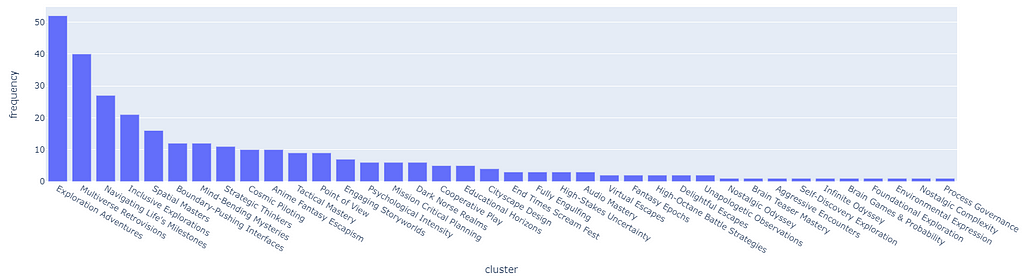
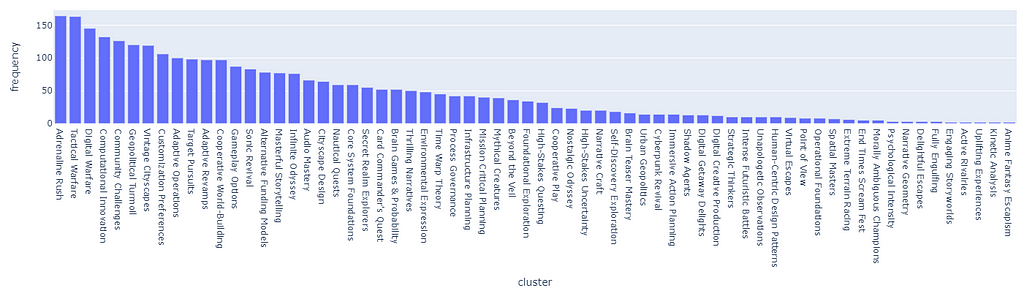
The following is a Monte Carlo simulation of 5000 random tag choices from the dataset. What we are looking at is the distribution of clusters that end up being chosen randomly after summing the scores. As we can see, the distribution is highly skewed and it will certainly break the recommender in favor of the clusters with the highest score.
recommended cluster frequency over 10k simulations, image by Author
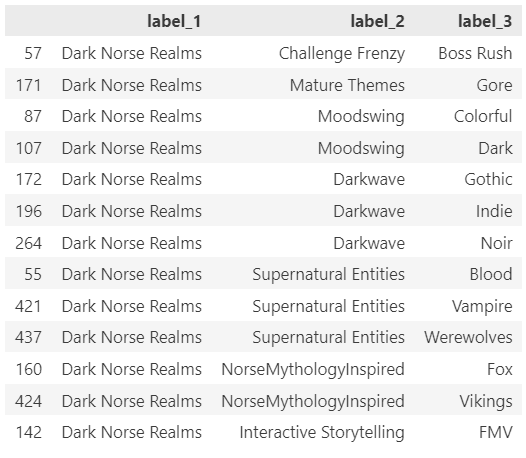
For example, the cluster “Dark Norse Realms” contains the tag Indie, which appears in 64% of all Samples (basically is almost impossible not to pick repetitively).
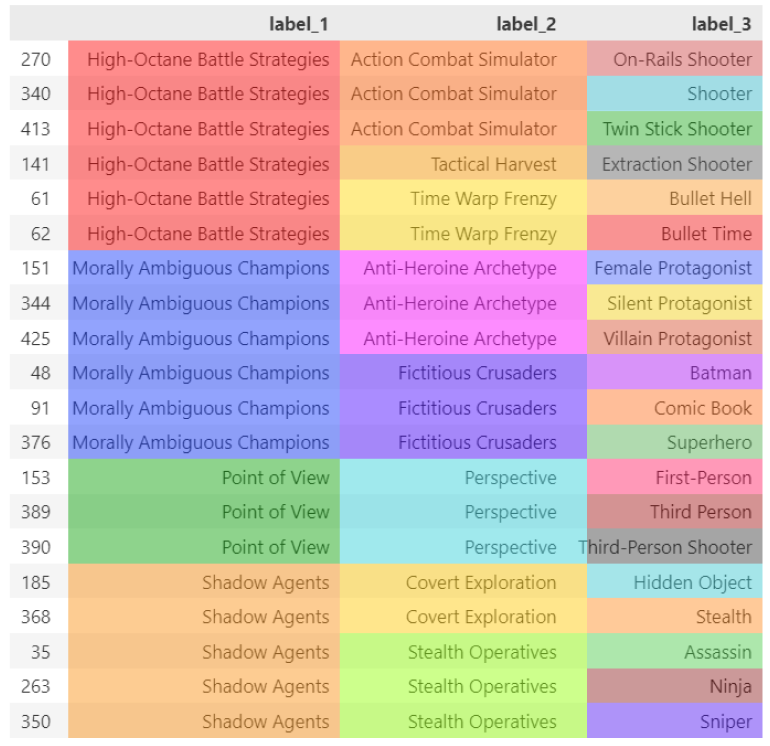
example of recommended clusters, image by Author
To be even more precise, let us directly simulate 100 different random sessions, each one picking the top 3 clusters from the session (the main user preference we keep track of), let us simulate entire user sessions so that the data is more complete. It is normal, especially when using a decay function, for the distribution to be non-uniform, and keep shifting over time.
recommended cluster frequency over 10k simulations, image by Author
However, if the skewness is excessive, the result is that the majority of users will be recommended the top 5% of the clusters 95% of the time (it is not precise numbers, just to prove my point).
4.2 Balancing probability distribution
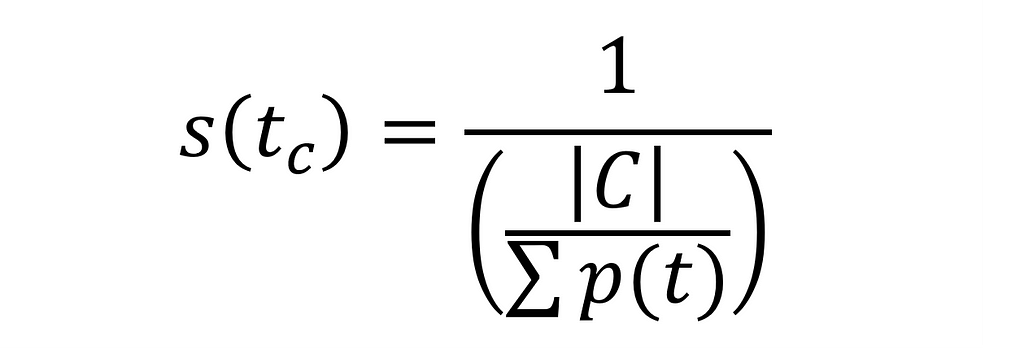
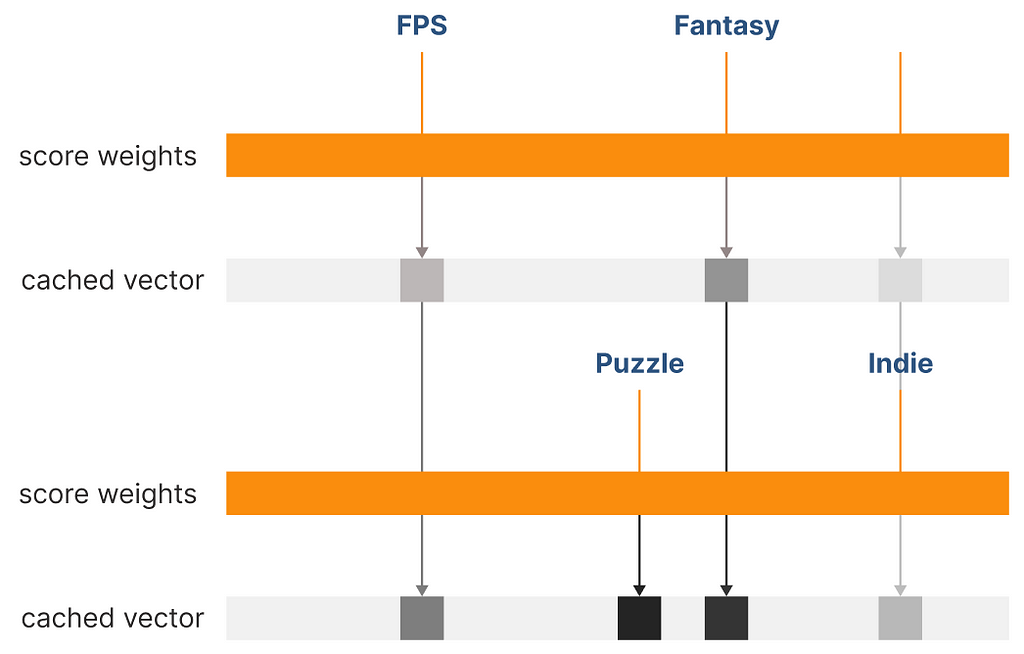
Instead, let us use a proper formula for frequency adjustment. Because the probability for each cluster is different, we want to assign a score that, when used to balance the weights of our user vector, will balance cluster retrieval:
scoring function to balance probability non-uniformity, image by Author
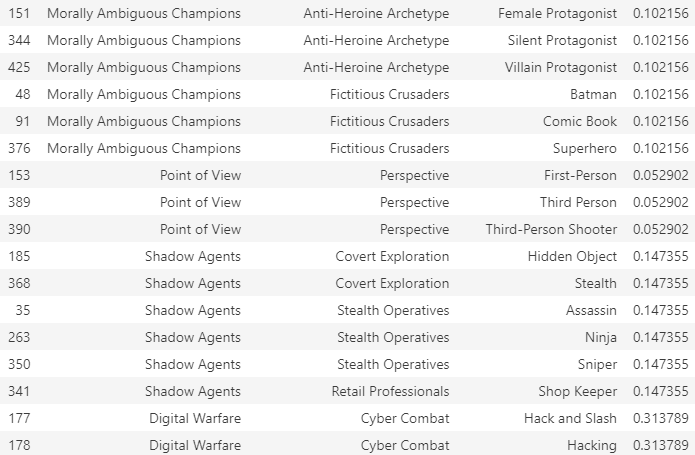
Let us look at the score assigned to each tag for 4 different random clusters:
example of recommended clusters, image by Author
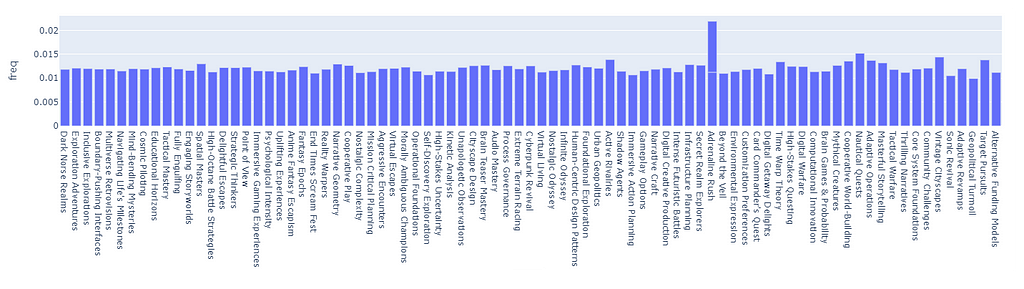
If we apply the score to the random pick (5000 picks, counting the frequency adjusted by the aforementioned weight), we can see how the tag distribution is now balanced (the outline ~ “Adrenaline Rush” is caused by a duplicate name):
cluster probability over 10k simulations, image by Author
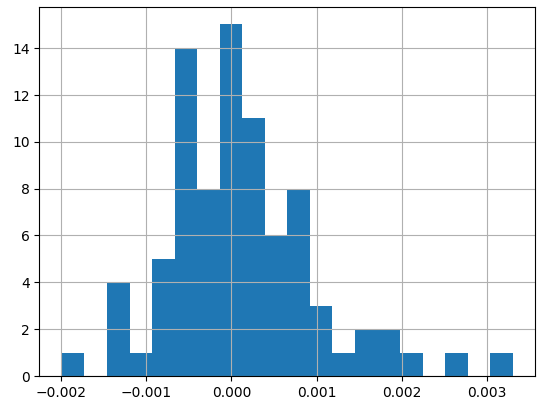
In fact, by looking at the normal distribution of the fluctuations, we see that the standard deviation for picking any cluster is approx. 0.1, which is extremely low (especially compared to before).
fluctuation distribution over 10k simulations, image by Author
By replicating 100 sessions, we see how, even with a pseudo-uniform probability distribution, the clusters amass over time following the Pareto principle.
recommended cluster frequency over 10k simulations, image by Author
5. Univariate sequential encoding
It is time to build the sequential mechanism to keep track of user choices over time. The mechanism I idealized works on two separate vectors (that after the process end up being one, hence univariate), a historical vector and a caching vector.
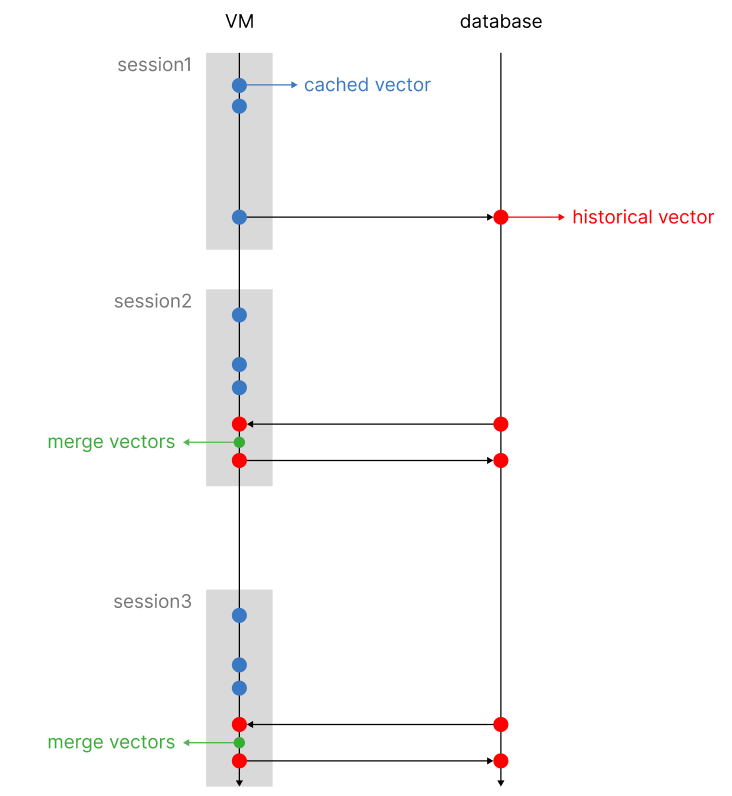
The historical vector is the one that is used to perform knn on the existing clusters. Once a session is concluded, we update the historical vector with the new user choices. At the same time, we adjust existing values with a decay function that diminishes the existing weights over time. By doing so, we make sure to keep up with the customer trends and give more weight to new choices, rather than older ones.
Rather than updating the vector at each user makes a choice (which is not computationally efficient, in addition, we risk letting older choices decay too quickly, as every user interaction will trigger the decay mechanism), we can store a temporary vector that is only valid for the current session. Each user interaction, converted into a vector using the tag frequency as one hot weight, will be summed to the existing cached vector.
vector sum workflow, image by Author
Once the session is closed, we will retrieve the historical vector from the database, merge it with the cached vector, and apply the adjustment mechanisms, such as the decay function and pruning, as we will see later). After the historical vector has been updated, it will be stored in the database replacing the old one.
session recommender workflow, image by Author
The two reasons to follow this approach are to minimize the weight difference between older and newer interactions and to make the entire process scalable and computationally efficient.
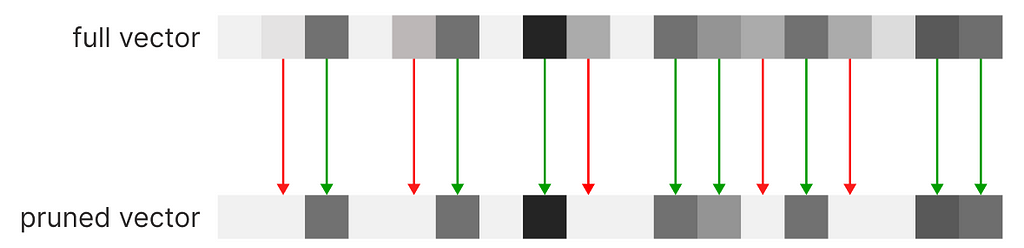
6. Pruning Mechanism
The system has been completed. However, there is an additional problem: covariate encoding has one flaw: its base vector is scaled proportionally to the number of encoded tags. For example, if our database were to reach 100k tags, the vector would have an equivalent number of dimensions.
The original covariate encoding architecture already takes this problem into account, proposing a PCA compression mechanism as a solution. However, applied to our recommender, PCA causes issues when iteratively summing vectors, resulting in information loss. Because every user choice will cause a summation of existing vectors with a new one, this solution is not advisable.
However, If we cannot compress the vector we can prune the dimensions with the lowest scores. The system will execute a knn based on the most relevant scores of the vector; this direct method of feature engineering won’t affect negatively (better yet, not excessively) the results of the final recommendation.
pruning mechanism, image by Author
By pruning our vector, we can arbitrarily set a maximum number of dimensions to our vectors. Without altering the tag indexes, we can start operating on sparse vectors, rather than a dense one, a data structure that only saves the active indexes of our vectors, being able to scale indefinitely. We can compare the recommendations obtained from a full vector (dense vector) against a sparse vector (pruned vector).
recommendation of the same user vector using a dense vs. sparse vector, image by Author
As we can see, we can spot minor differences, but the overall integrity of the vector has been maintained in exchange for scalability. A very intuitive alternative to this process is by performing clustering at the tag level, maintaining the vector size fixed. In this case, a tag will need to be assigned to the closest tag semantically, and will not occupy its dedicated dimension.
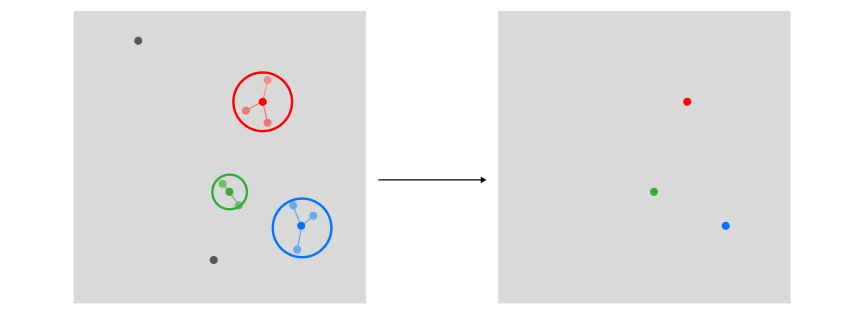
7. Exemplar estimation
Now that you have fully grasped the theory behind this new approach, we can compare them more clearly. In a multivariate approach, the first step was to identify the top user preferences using clustering. As we can see, this process required us to store as many vectors as found exemplars.
Examplar extraction, image by Author
However, in a univariate approach, because covariate encoding works on a transposed version of the encoded data, we can use sections of our historical vector to store user preferences, hence only using a single vector for the entire process. Using the historical vector as a query to search through encoded tags: its top-k results from a knn search will be equivalent to the top-k preferential clusters.
difference between multivariate and univariate sets of vectors, image by Author
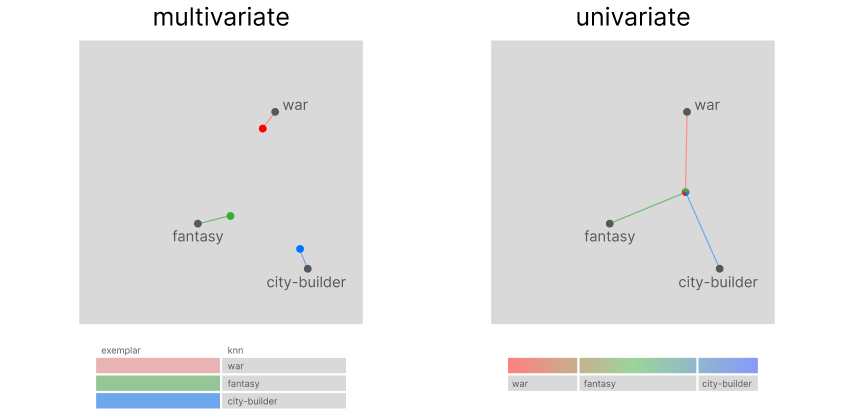
8. Recommendation approaches
Now that we have captured more than one preference, how do we plan to recommend items? This is the major difference between the two systems. The traditional multivariate recommender will use the exemplar to recommend k items to a user. However, our system has assigned our customer one supercluster and the top subclusters under it (depending on our level of tag segmentation, we can increase the number of levels). We will not recommend the top k items, but the top k subclusters.
Using groupby instead of vector search
So far, we have been using a vector to store data, but that does not mean we need to rely on vector search to perform recommendations, because it will be much slower than a SQL operation. Note that obtaining the same exact results using vector search on the user array is indeed possible.
If you are wondering why you would be switching from a vector-based system to a count-based system, it is a legitimate question. The simple answer to that is that this is the most loyal replica of the multivariate system (as portrayed in the reference images), but much more scalable (it can reach up to 3000 recommendations/s on 16 CPU cores using pandas). Originally, the univariate recommender was designed to employ vector search, but, as showcased, there are simpler and better search algorithms.
Simulation
Let us run a full test that we can monitor. We can use the code from the sample notebook: for our simple example, the user selects at least one game labeled with corresponding tags.
# if no vector exists, the first choices are the historical vector historical_vector = user_choices(5, tag_lists=[['Shooter', 'Fantasy']], tag_frequency=tag_frequency, display_tags=False)
At the end of 3 sessions, these are the top 3 exemplars (label_1) extracted from our recommender:
recommendation after 3 sessions, image by Author
In the notebook, you will find the option to perform Monte Carlo simulations, but there would be no easy way to validate them (mostly because team games are not tagged with the highest accuracy, and I noticed that most small games list too many unrelated or common tags).
Conclusion
The architectures of the most popular recommender systems still do not take into account session history, but with the development of new algorithms and the increase in computing power, it is now possible to tackle a higher level of complexity.
This new approach should offer a comprehensive alternative to the sequential recommender systems available on the market, but I am convinced that there is always room for improvement. To further enhance this architecture it would be possible to switch from a clustering-based to a network-based approach.
It is important to note that this recommender system can only excel when applied to a limited number of domains but has the potential to shine in conditions of scarce computational resources or extremely high demand.
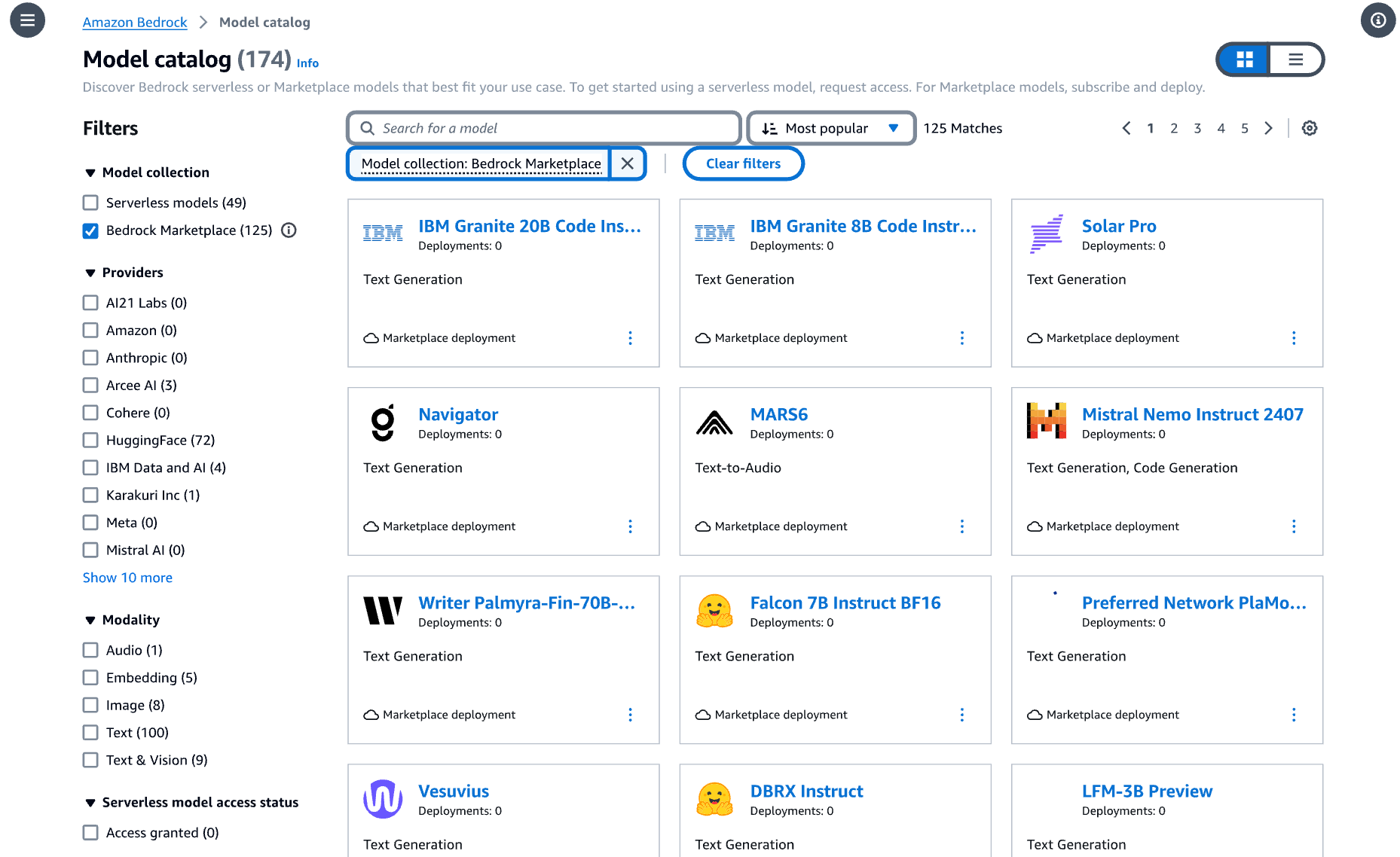
At AWS re:Invent 2024, we are excited to introduce Amazon Bedrock Marketplace. This a revolutionary new capability within Amazon Bedrock that serves as a centralized hub for discovering, testing, and implementing foundation models (FMs). In this post, we discuss the advantages and capabilities of Amazon Bedrock Marketplace and Nemotron models, and how to get started.
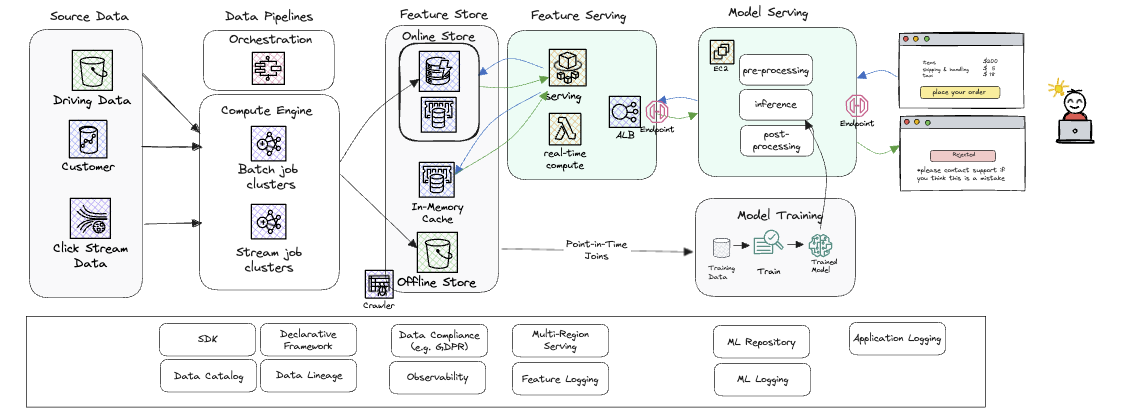
In this post, we discuss how Amazon SageMaker and Tecton work together to simplify the development and deployment of production-ready AI applications, particularly for real-time use cases like fraud detection. The integration enables faster time to value by abstracting away complex engineering tasks, allowing teams to focus on building features and use cases while providing a streamlined framework for both offline training and online serving of ML models.
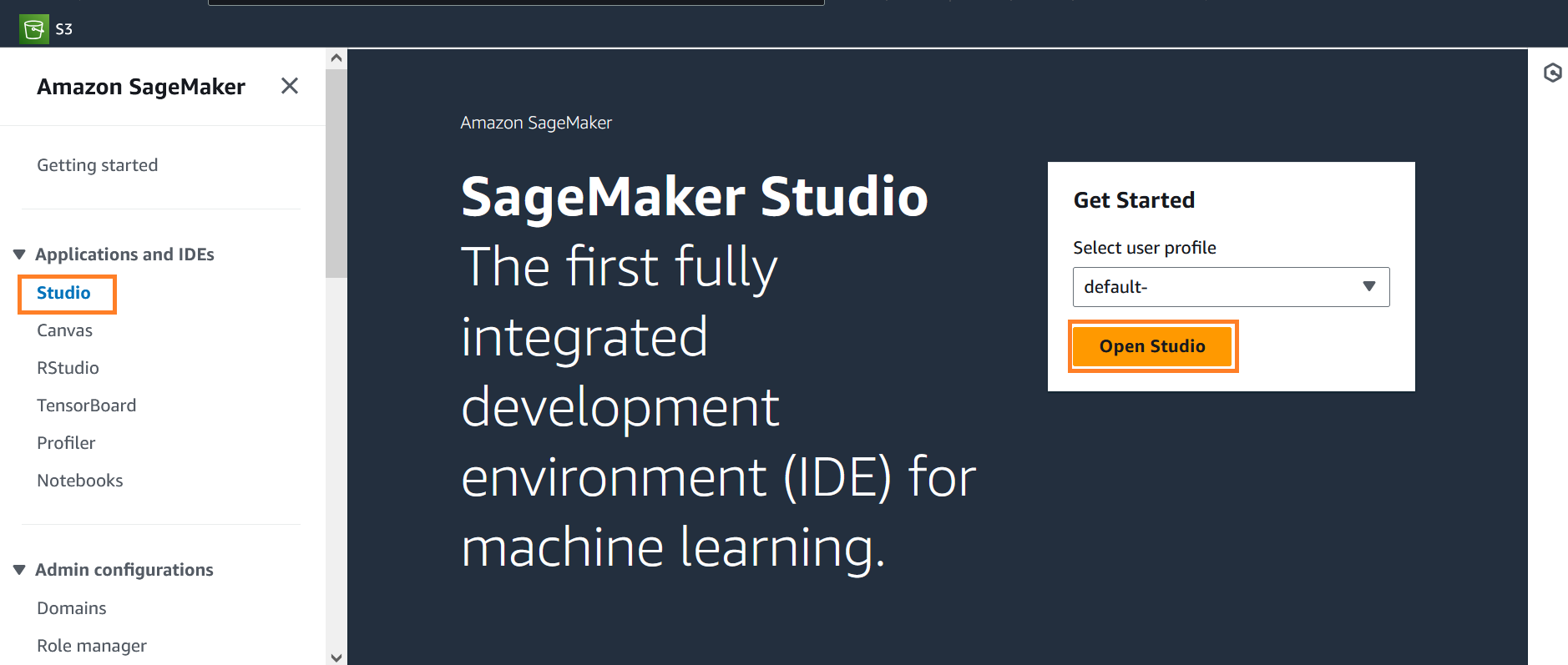
In this post, we explore how to deploy AI models from SageMaker JumpStart and use them with Amazon Bedrock’s powerful features. Users can combine SageMaker JumpStart’s model hosting with Bedrock’s security and monitoring tools. We demonstrate this using the Gemma 2 9B Instruct model as an example, showing how to deploy it and use Bedrock’s advanced capabilities.
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept”, you consent to the use of ALL the cookies.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duration
Description
cookielawinfo-checkbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checkbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.