Seamless access to content and insights is crucial for delivering exceptional customer experiences and driving successful business outcomes. Box, a leading cloud content management platform, serves as a central repository for diverse digital assets and documents in many organizations. An enterprise Box account typically contains a wealth of materials, including documents, presentations, knowledge articles, and […]
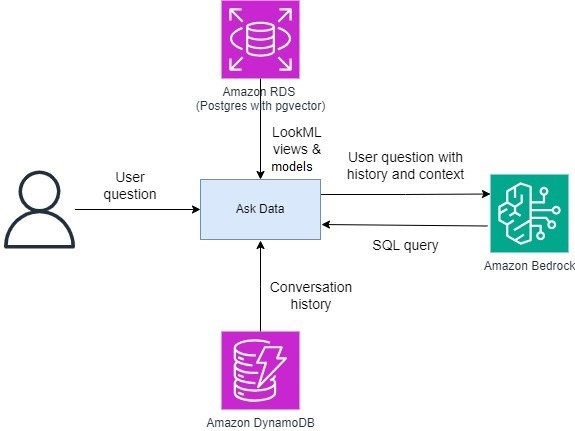
As one of the largest AWS customers, Twilio engages with data, artificial intelligence (AI), and machine learning (ML) services to run their daily workloads. This post highlights how Twilio enabled natural language-driven data exploration of business intelligence (BI) data with RAG and Amazon Bedrock.
The constant flow of model releases, new tools, and cutting-edge research can make it difficult to pause for a few minutes and reflect on AI’s big picture. What are the questions that practitioners are trying to answer—or, at least, need to be aware of? What does all the innovation actually mean for the people who work in data science and machine learning, and for the communities and societies that these evolving technologies stand to shape for years to come?
Our lineup of standout articles this week tackle these questions from multiple angles—from the business models supporting (and sometimes generating) the buzz behind AI to the core goals that models can and cannot achieve. Ready for some thought-provoking discussions? Let’s dive in.
The Economics of Generative AI “What should we be expecting, and what’s just hype? What’s the difference between the promise of this technology and the practical reality?” Stephanie Kirmer’s latest article takes a direct, uncompromising look at the business case for AI products—a timely exploration, given the increasing pessimism (in some circles, at least) about the industry’s near-future prospects.
The LLM Triangle Principles to Architect Reliable AI Apps Even if we set aside the economics of AI-powered products, we still need to grapple with the process of actually building them. Almog Baku’s recent articles aim to add structure and clarity into an ecosystem that can often feel chaotic; taking a cue from software developers, his latest contribution focuses on the core product-design principles practitioners should adhere to when building AI apps.
What Does the Transformer Architecture Tell Us? Conversations about AI tend to revolve around usefulness, efficiency, and scale. Stephanie Shen’s latest article zooms in on the inner workings of the transformer architecture to open up a very different line of inquiry: the insights we might gain about human cognition and the human brain by better understanding the complex mathematical operations within AI systems.
Why Machine Learning Is Not Made for Causal Estimation With the arrival of any groundbreaking technology, it’s crucial to understand not just what it can accomplish, but also what it cannot. Quentin Gallea, PhD highlights the importance of this distinction in his primer on predictive and causal inference, where he unpacks the reasons why models have become so good at the former while they still struggle with the latter.
Looking for other questions to explore this week—whether big, mid-sized, or extremely focused? We invite you to explore some of our other recent standouts.
Thank you for supporting the work of our authors! We love publishing articles from new authors, so if you’ve recently written an interesting project walkthrough, tutorial, or theoretical reflection on any of our core topics, don’t hesitate to share it with us.
Pushing the boundaries: generalizing temporal difference algorithms
Introduction
Reinforcement learning is a domain in machine learning that introduces the concept of an agent learning optimal strategies in complex environments. The agent learns from its actions, which result in rewards, based on the environment’s state. Reinforcement learning is a challenging topic and differs significantly from other areas of machine learning.
What is remarkable about reinforcement learning is that the same algorithms can be used to enable the agent adapt to completely different, unknown, and complex conditions.
Note. To fully understand the concepts included in this article, it is highly recommended to be familiar with the basics of Monte Carlo methods and temporal difference learning introduced in the previous articles.
In the previous part, we analyzed how TD algorithms work by combining principles of dynamic programming and MC methods. In addition, we looked at a one-step TD algorithm — the simplest TD implementation. In this article, we will generalize TD concepts and see when it may be advantageous to use other algorithm variants.
This article is based on Chapter 7 of the book “Reinforcement Learning” written by Richard S. Sutton and Andrew G. Barto. I highly appreciate the efforts of the authors who contributed to the publication of this book.
Idea
Let us pause for a second and understand what one-step TD and MC algorithms have in common. If we omit overly specific details, we will notice that both of them are actually very similar and use the same state update rule except for a single difference:
One-step TD updates every state by looking at the n = 1 next state.
MC updates every state after analyzing the whole episode. This can be roughly perceived as an update for every state occurring after n steps (where n can be potentially a large number).
We have two extreme cases where n = 1 and where n = the number of remaining states in the episode sequence. A logical question arises: could we use a value of n that falls somewhere in the middle of these extreme values?
The answer is yes. And this concept is generalized through n-step Bootstrapping.
n-step Bootstrapping generalizes TD algorithms
Workflow
In one-step TD, we analyze the difference between the received reward and how the state value changes by switching from the current state to the next (n = 1). This idea can be easily generalized to multiple steps. To do this, let us introduce the n-step return, which calculates the accumulated discounted reward between the current state t and the future state at step t + n. In addition, it also adds state value at step t + n.
n-step return
Using the analogous update rule introduced in previous articles, this time we can compare an n-step return with the current state value and derive a new update rule:
Update rule for n-step bootstrapping
To better understand the workflow, let us draw a diagram of state relationships for several values of n. The diagram below demonstrates how information about next states and rewards is used to update previous states in the sequence.
Relationships between rewards and state values during updates for different values of n
For instance, let us take the case of 3-step TD:
The beginning of the episode is generated up until the state S₃.
State S₀ is updated by using the 3-step return, which sums up rewards R₁, R₂ and R₃ and the value of state S₃.
State S₄ is generated.
State S₁ is updated by using the 3-step return, which sums up rewards R₂, R₃ and R₄ and the value of state S₄.
State S₅ is generated.
State S₅ is updated by using the 3-step return, which sums up rewards R₃, R₄ and R₅ and the value of state S₅.
The analogous process is repeated until we reach the last state of the episode.
If for a given state, there are fewer than n states left to calculate the n-step return, then the truncated n-step return is used instead, accumulating available rewards until the terminal state.
If n = ∞, then n-step TD is a Monte Carlo algorithm.
n-step TD control
In part 5, we discussed Sarsa, Q-learning and Expected Sarsa algorithms. All of them were based on using information from the next state. As we have already done in this article, we can expand this idea to n-step learning. To achieve this, the only change that needs to be made is to adjust their update formulas to use information not from the next state but from n steps later. Everything else will remain the same.
Choosing the best value of n
In part 5, we also highlighted the advantages of one-step TD algorithms over MC methods and how they lead to faster convergence. If so, why not always use one-step TD instead of n-step methods? As it turns out in practice, n = 1 is not always optimal value. Let us look at an example provided by Richard S. Sutton and Andrew G. Barto’s RL book. This example shows a situation where using larger values of n optimizes the learning process.
The image below shows a path made by the agent in a given maze during the first episode of the Sarsa algorithm. The agent’s goal is to find the shortest path to X. When the agent steps on X, it receives a reward R = 1. Every other step made in the maze results in a reward R = 0.
Let us now compare how the agent learns in 1-step Sarsa and 10-step Sarsa. We will assume that all action values are initialised to 0.
In 1-step Sarsa, for every move, the update is performed based only on the information from the next state. This means the only action value with a meaningful update is the one that leads directly to the goal X in a single step. In this case, the agent receives a positive reward and thus learns that making the “up” final move is indeed an optimal decision. However, all other updates do not make any impact because the received reward R = 0 does not change any action values.
On the other hand, in 10-step Sarsa, the final move will propagate its positive reward to the action values for the last 10 moves. In this way, the agent will learn much more information from the episode.
Therefore, in these maze settings, the larger values of n would make the agent learn faster.
Having looked at this example, we can conclude an important fact:
The best value of n in temporal difference learning is problem-dependent.
Conclusion
The generalization of one-step TD and Monte Carlo methods into n-step algorithms plays an important role in reinforcement learning as the best value of n usually lies between these two extremes.
Apart from this, there is no general rule for choosing the best value of n since every problem is unique. While larger values of n lead to more delayed updates, they can still perform better than smaller ones. Ideally one should treat n as a hyperparameter and carefully select it to find the optimum.
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept”, you consent to the use of ALL the cookies.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duration
Description
cookielawinfo-checkbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checkbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.