After reading this article, you’ll be very well equipped with the tools and reasoning capability to think about the effects of any Lk regularization term and decide if it applies to your situation.
What is regularization in machine learning?
Let’s look at some definitions on the internet and generalize based on those.
Regularization is a set of methods for reducing overfitting in machine learning models. Typically, regularization trades a marginal decrease in training accuracy for an increase in generalizability. (IBM)
Regularization makes models stable across different subsets of the data. It reduces the sensitivity of model outputs to minor changes in the training set. (geeksforgeeks)
Regularization in machine learning serves as a method to forestall a model from overfitting. (simplilearn)
In general, regularization is a technique to prevent the model from overfitting and to allow the model to generalize its predictions on unseen data. Let’s look at the role of weight regularization in particular.
Why use weight regularization?
One could employ many forms of regularization while training a machine learning model. Weight regularization is one such technique, which is the focus of this article. Weight regularization means applying some constraints on the learnable weights of your machine learning model so that they allow the model to generalize to unseen inputs.
Weight regularization improves the performance of neural networks by penalizing the weight matrices of nodes. This penalty discourages the model from having large parameter (weight) values. It helps control the model’s ability to fit the noise in the training data. Typically, the biases in the machine learning model are not subject to regularization.
How is regularization implemented in deep neural networks?
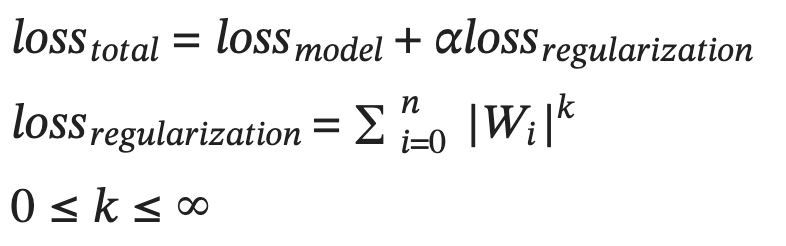
Typically, a regularization loss is added to the model’s loss during training. It allows us to control the model’s weights during training. The formula looks like this:
Figure-1: Total loss as a sum of the model loss and regularization loss. k is a floating point value and indicates the regularization norm. Alpha is the weighting factor for the regularization loss.
Typical values of k used in practice are 1 and 2. These are called the L1 and L2 regularization schemes.
But why do we use just these two values for the most part, when in fact there are infinitely many values of k one could use? Let’s answer this question with an interpretation of the L1 and L2 regularization schemes.
Interpretation of different weight regularization types
The two most common types of regularization used for machine learning models are L1 and L2 regularization. We will start with these two, and continue to discuss some unusual regularization types such as L0.5 and L3 regularization. We will take a look at the gradients of the regularization losses and plot them to intuitively understand how they affect the model weights.
L1 regularization
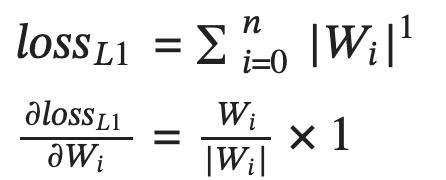
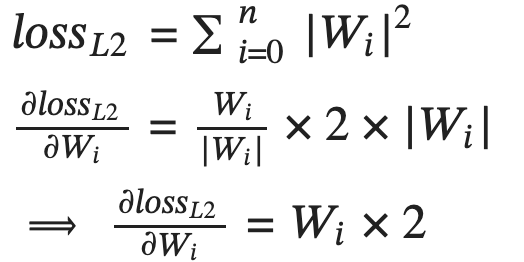
L1 regularization adds the average of the absolute value of the weights together as the regularization loss.
Figure-2: L1 regularization loss and its partial derivative with respect to each weight Wi.
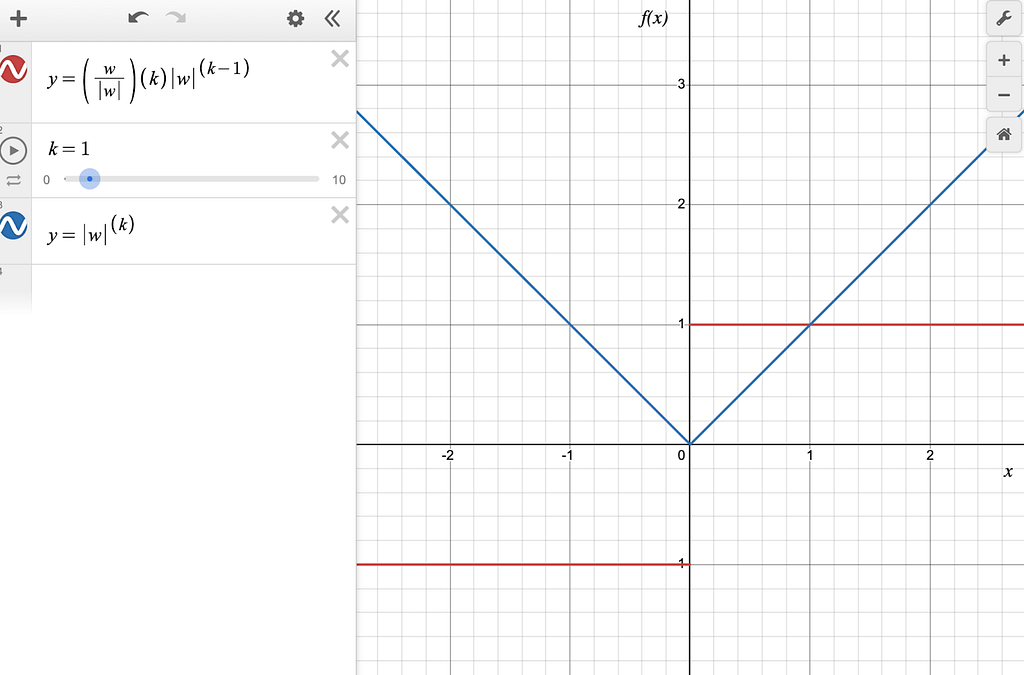
It has the effect of adjusting the weights by a constant (in this case alpha times the learning rate) in the direction that minimizes the loss. Figure 3 shows a graphical representation of the function and its derivative.
Figure-3: The blue line is |w| and the red line is the derivative of |w|.
You can see that the derivative of the L1 norm is a constant (depending on the sign of w), which means that the gradient of this function only depends on the sign of w and not its magnitude. The gradient of the L1 norm is not defined at w=0.
It means that the weights are moved towards zero by a constant value at each step during backpropagation. Throughout training, it has the effect of driving the weights to converge at zero. That is why the L1 regularization makes a model sparse (i.e. some of the weights become 0). It might cause a problem in some cases if it ends up making a model too sparse. The L2 regularization does not have this side-effect. Let’s discuss it in the next section.
L2 regularization
L2 regularization adds the average of the square of the absolute value of the weights together as the regularization loss.
Figure-4: L2 regularization loss and its partial derivative with respect to each weight Wi.
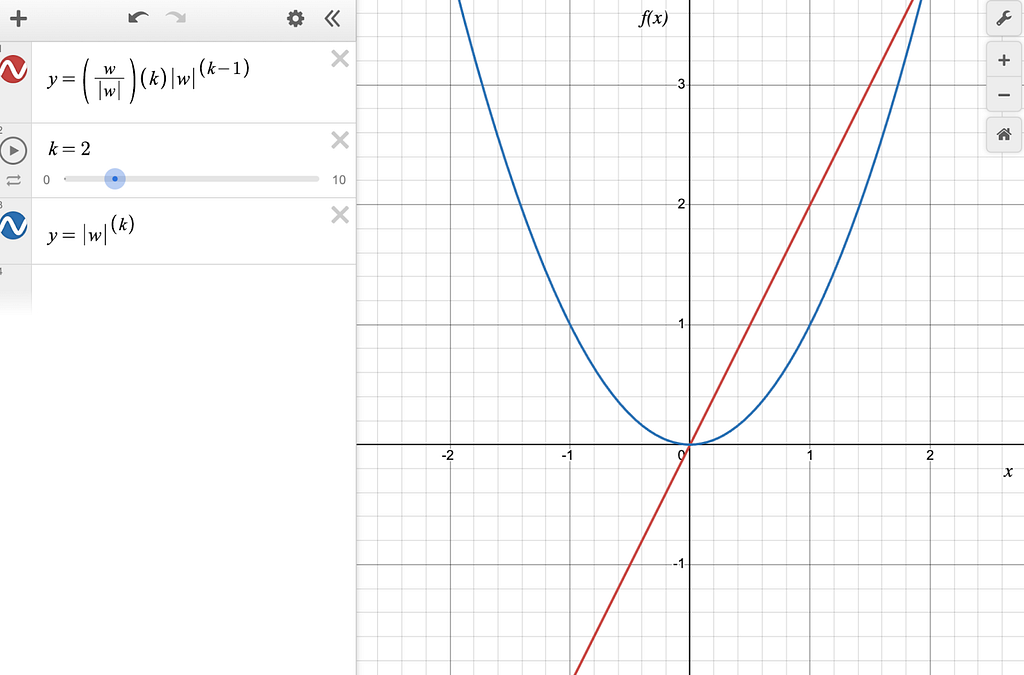
It has the effect of adjusting each weight by a multiple of the weight itself in the direction that minimizes the loss. Figure 5 shows a graphical representation of the function and its derivative.
Figure-5: The blue line is pow(|w|, 2) and the red line is the derivative of pow(|w|, 2).
You can see that the derivative of the L2 norm is just the sign-adjusted square root of the norm itself. The gradient of the L2 norm depends on both the sign and magnitude of the weight.
This means that at every gradient update step, the weights will be adjusted toward zero by an amount that is proportional to the weight’s value. Over time, this has the effect of drawing the weights toward zero, but never exactly zero, since subtracting a constant factor of a value from the value itself never makes the result exactly zero unless it is zero to begin with. The L2 norm is commonly used for weight decay during machine learning model training.
Let’s consider L0.5 regularization next.
L0.5 regularization
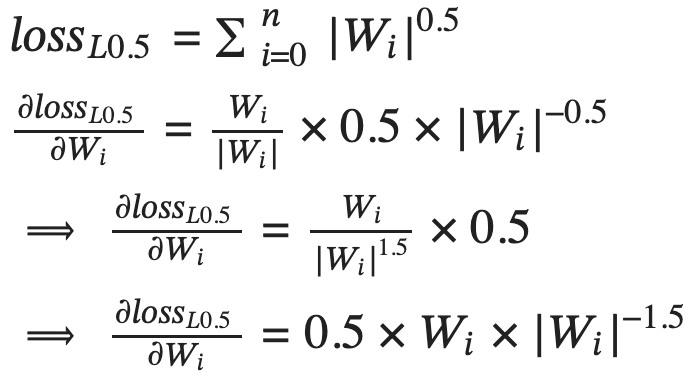
L0.5 regularization adds the average of the square root of the absolute value of the weights together as the regularization loss.
Figure-6: L0.5 regularization loss and its partial derivative with respect to each weight Wi.
This has the effect of adjusting each weight by a multiple (in this case alpha times the learning rate) of the inverse square root of the weight itself in the direction that minimizes the loss. Figure 7 shows a graph of the function and its derivative.
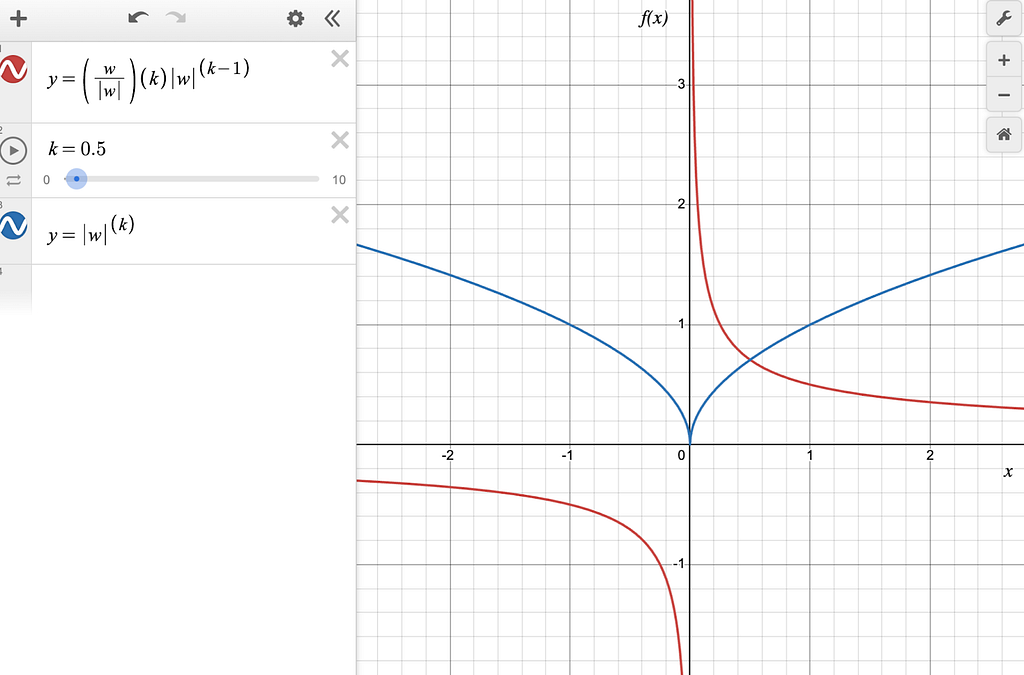
Figure-7: The blue line is pow(|w|, 0.5) and the red line is the derivative of pow(|w|, 0.5).
You can see that the derivative of the L0.5 norm is a discontinuous function, which peaks at the positive values of w close to 0 and it reaches negative infinity for the negative values of w close to 0. Further, we can draw the following conclusions from the graph:
As |w| tends to 0, the magnitude of the gradient tends to infinity. During backpropagation, these values of w will quickly swing to past 0 because large gradients will cause a large change in the value of w. In other words, negative w will become positive and vice-versa. This cycle of flip flops will continue to repeat itself.
As |w| increases, the magnitude of the gradient decreases. These values of w are stable because of small gradients. However, with each backpropagation step, the value of w will be drawn closer to 0.
This is hardly what one would want from a weight regularization routine, so it’s safe to say that L0.5 isn’t a great weight regularizer. Let’s consider L3 regularization next.
L3 regularization
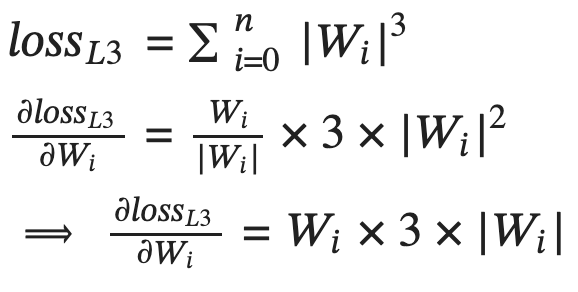
L3 regularization adds the average of the cube of the absolute value of the weights together as the regularization loss.
Figure-8: L3 regularization loss and its partial derivative with respect to each weight Wi.
This has the effect of adjusting each weight by a multiple (in this case alpha times the learning rate) of the square of the weight itself in the direction that minimizes the loss.
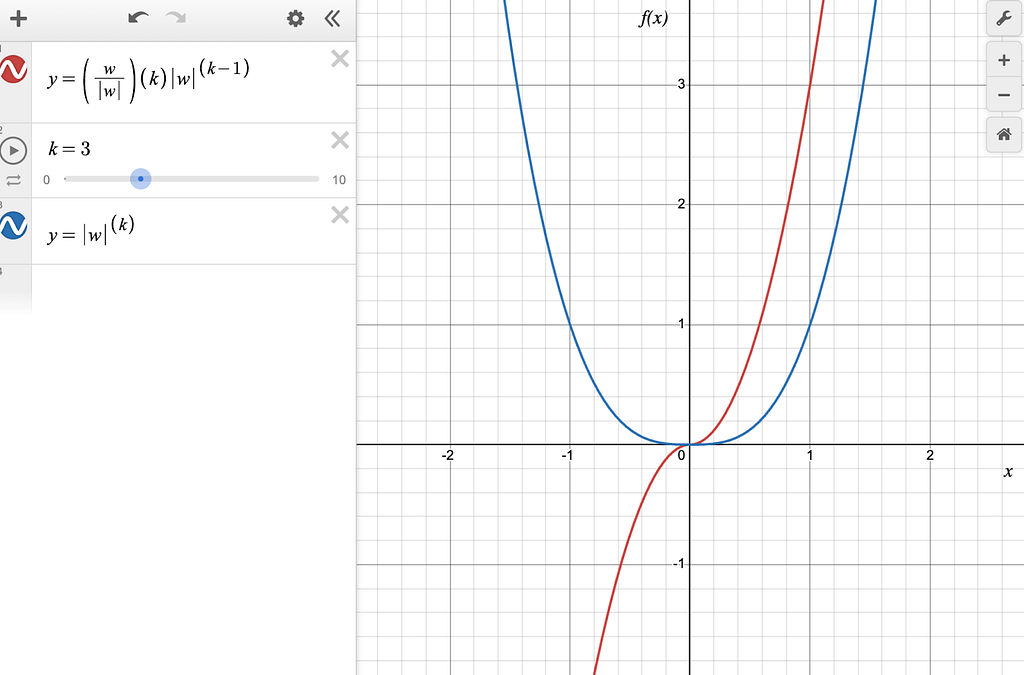
Graphically, this is what the function and its derivative look like.
Figure-9: The blue line is pow(|w|, 3) and the red line is the derivative of pow(|w|, 3).
To really understand what’s going on here, we need to zoom in to the chart around the w=0 point.
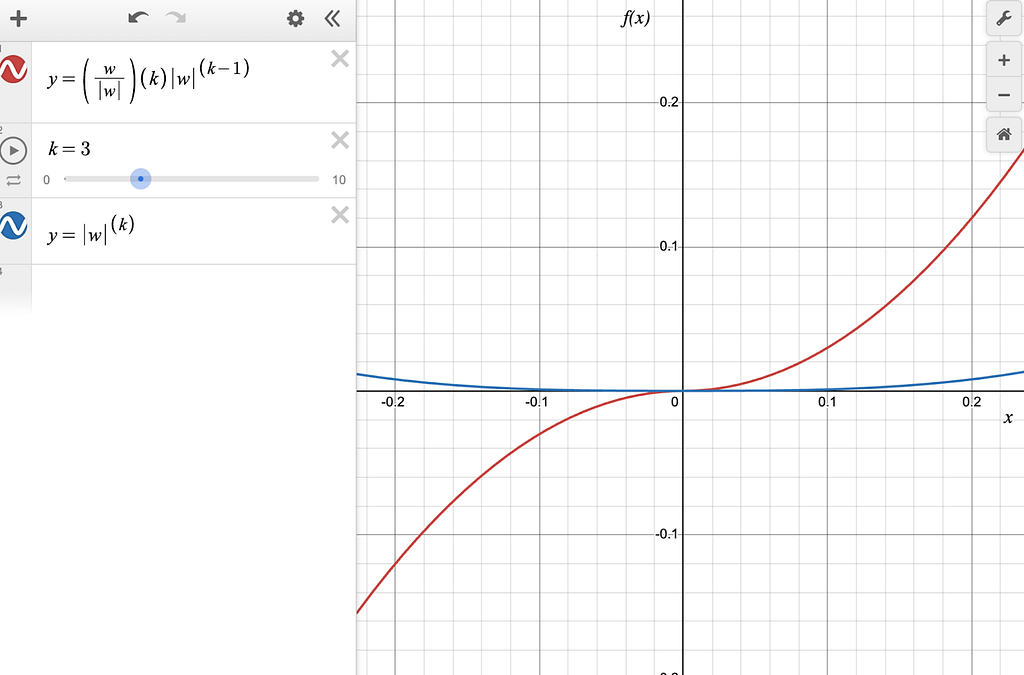
Figure-10: The blue line is pow(|w|, 3) and the red line is the derivative of pow(|w|, 3), zoomed in at small values of w around 0.0.
You can see that the derivative of the L3 norm is a continuous and differentiable function (despite the presence of |w| in the derivative), which has a large magnitude at large values of w and a small magnitude for small values of w.
Interestingly, the gradient is very close to zero for very small values of w around the 0.0 mark.
The interpretation of the gradient for L3 is interesting.
For large values of w, the magnitude of the gradient is large. During backpropagation, these values will be pushed towards 0.
Once the weight w reaches an inflection point (close to 0.0), the gradient almost vanishes, and the weights will stop getting updated.
The effect is that it will drive the weights with large magnitudes close to 0, but not exactly 0.
Let’s consider higher norms to see how this plays out in the limiting case.
Beyond L3 regularization
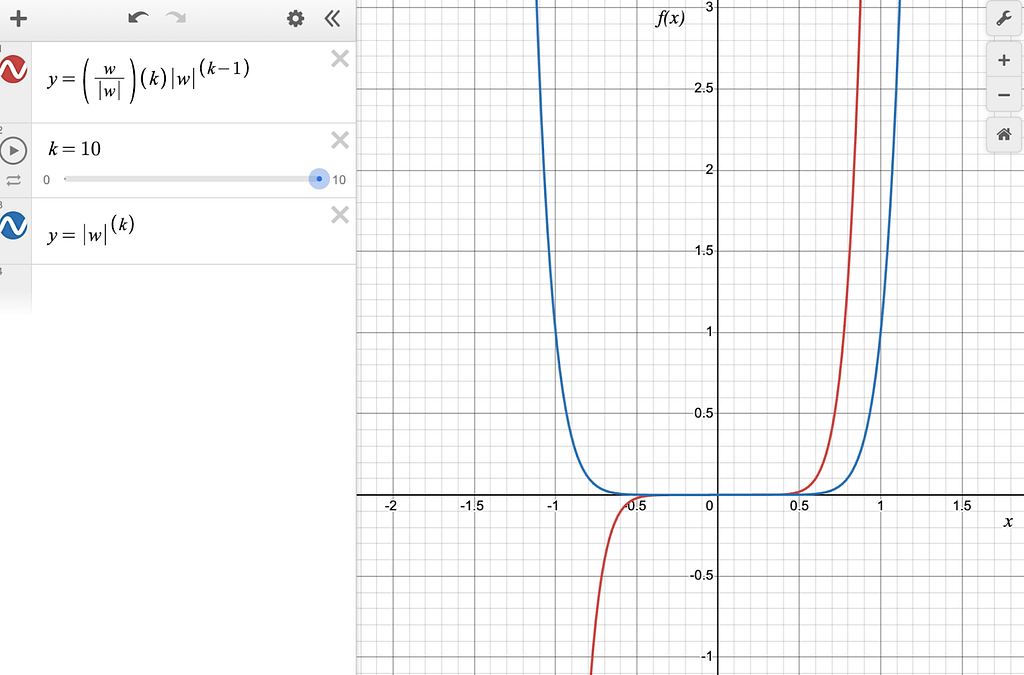
To understand what happens for Linfinity, we need to see what happens in the case of the L10 regularization case.
Figure-11: The blue line is pow(|w|, 10) and the red line is the derivative of pow(|w|, 10), zoomed in at small values of w around 0.0.
One can see that the gradients for values of |w| < 0.5 are extremely small, which means that regularization won’t be effective for those values of w.
Exercise
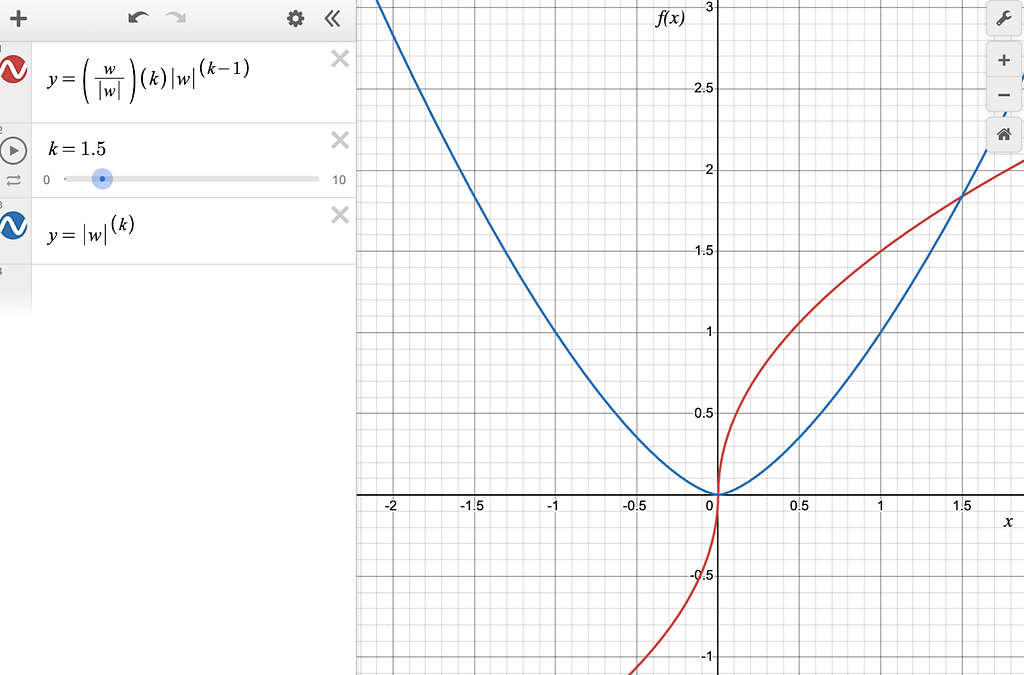
Based on everything we saw above, L1 and L2 regularization are fairly practical based on what you want to achieve. As an exercise, try to reason about the behavior of the L1.5 regularization, whose chart is shown below.
Figure-12: The blue line is pow(|w|, 1.5) and the red line is the derivative of pow(|w|, 1.5).
Conclusion
We took a visual and intuitive look at the L1 and L2 (and in general Lk) regularization terms to understand why L1 regularization results in sparse model weights and L2 regularization results in model weights close to 0. Framing the solution as inspecting the resulting gradients is extremely valuable during this exercise.
We explored L0.5, L3, and L10 regularization terms and graphically, and you (the reader) reasoned about regularization terms between L1 and L2 regularization, and developed an intuitive understanding of what implications it would have on a model’s weights.
We hope that this article has added to your toolbox of tricks you can use when considering regularization strategies during model training to fine-tuning.
All the charts in this article were created using the online desmos graphing calculator. Here is a link to the functions used in case you wish to play with them.
All the images were created by the author(s) unless otherwise mentioned.
References
We found the following articles useful while researching the topic, and we hope that you find them useful too!
Training simulated humanoid robots to fight using five new Reinforcement Learning papers
Generated with GPT-4
I remembered the old TV show Battlebots recently and wanted to put my own spin on it. So I trained simulated humanoid robots to fight using five new Reinforcement Learning papers.
By reading below, you’ll learn the theory and math of how these five Reinforcement Learning algorithms work, see me implement them, and see them go head to head to determine the champion!
Deep Deterministic Policy Gradient (DDPG)
Decision Transformer
Soft Actor-Critic (SAC)
Imagination-Augmented Agents (I2A) with Proximal Policy Optimization (PPO)
Setting up the Simulation Environment:
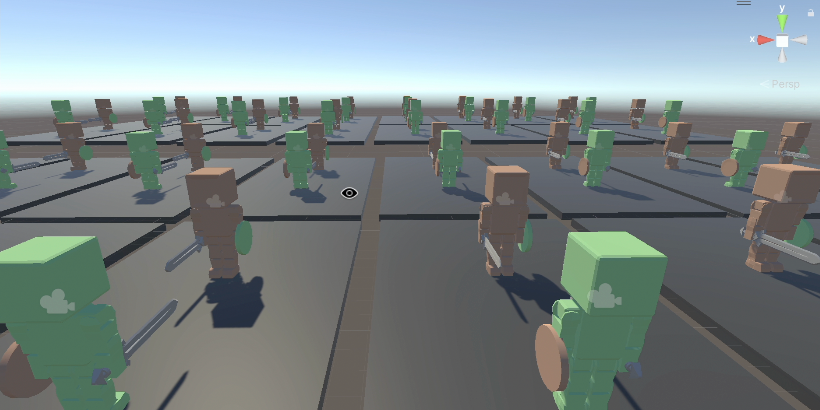
I used the Unity machine learning agents simulator and built each robotic body with 21 actuators on 9 joints, 10 by 10 RGB vision through a virtual camera in their head, and a sword and shield. I then wrote the C# code defining their rewards and physics interactions. Agents can earn rewards in three main ways:
Touching the sword to the opponent (‘Defeating’ their opponent)
Keeping the y-position of their head above their body (to incentivize them to stand up)
Going closer to their opponent than they were previously (to encourage agents to converge and fight)
Agents get reset after 1000 timesteps, and I parallelized the environment massively for training.
Massively parallelized training environment, my screenshot
Then it was time to write the algorithms. To understand the algorithms I used, it’s critical to understand what Q-Learning is, so let’s find out!
Q Learning (skip ahead if you’re familiar)
In Reinforcement Learning, we let an agent take actions to explore its environment, and reward it positively or negatively based on how close it is to the goal. How does the agent adjust its decision-making criteria to account for receiving better rewards?
Q Learning offers a solution. In Q Learning, we track Q-function Q(s,a), which tracks the expected return after action a_t from state s_t.
Where R(s,a) is the reward for the current state and action, y is the discount factor (a hyperparameter), and E[] is expected value.
If we properly learn this Q function, we can simply choose the action which returns the highest Q-value.
How do we learn this Q function?
Starting from the end of the episode, where we know the true Q value for certain (just our current reward), we can use recursion to fill in the previous Q values using the following update equation:
Where α is the learning rate, r is the immediate reward, γ is the discount factor (weight parameter), s’ is the next state, and max_a’ Q(s’,a’) is the maximum Q-value for the next state over all possible actions
Essentially, our new Q value becomes old Q value plus small percentage of the difference between the current reward + the next largest Q value and the old Q value. Now, when our agent wants to choose an action, they can select the action which yields the greatest Q value (expected reward)
You might notice a potential issue though: we are evaluating the Q function on every possible action at every timestep. This is fine if we have a limited number of possible actions in a discrete space, but this paradigm breaks down in continuous actions spaces, where it is no longer possible to efficiently evaluate the Q function over the infinite number of possible actions. This brings us to our first competing algorithm: (DDPG)
Deep Deterministic Policy Gradient (DDPG)
DDPG tries to use Q Networks in continuous action spaces in a novel way.
Innovation 1: Actor and Critic
We can’t use the Q network to make our decisions directly, but we can use it to train another separate decision-making function. This is the actor-critic setup: the Actor is the policy decides actions, and the Critic determines future expected rewards based on these actions
Target Critic: Q_target(s,a) = r + γ * Q’(s’, μ’(s’))
Where r is the immediate reward, γ is the discount factor, s’ is the next state, μ’(s’) is the target policy network’s action for the next state, Q’ is the target critic network, Target Actor: Gradient of expected return wrt policy ≈ 1/N * Σ ∇a Q(s, a)|a=μ(s) * ∇θ_μ μ(s)
Essentially, over N samples, how does Q value of action chosen by policy (wrt policy changes, which change wrt policy params
To update both, we use a Stochastic Gradient Ascent update with lr * gradient on MSE loss of current Q and target Q. Note that both actor and critic are implemented as neural networks.
Innovation 2: Deterministic Action Policy
Our policy can either be deterministic (guaranteed action for each state) or stochastic (sample action for each state according to a probability distribution). The deterministic action policy for efficient evaluation of Q function (singular recursive evaluations since only one action for each state).
How do we explore with a deterministic policy, though? Won’t we be stuck running the same actions over and over again? This would be the case, however, we can increase the agent’s exploration by adding randomly generated noise to encourage exploration (a bit like how mutation benefits evolution by allowing it to explore unique genetic possibilities)
Innovation 3: Batch Learning in interactive environments
We also want to get more bang for our buck with each timestep observed (which consists of state action reward next state): so we can store previous tuples of timestep data and use it for training in the future
This allows us to use batch learning offline (which means using previously collected data instead of interaction through an environment), plus lets us parallelize to increase training speed with a GPU. We also now have independent identically distributed data as opposed to the biased sequential data we get regularly (where the value of a datapoint depends on previous datapoints)
Innovation 4: Target Networks
Usually Q Learning with NNs is too unstable and doesn’t converge to an optimal solution as easily because updates are too sensitive/powerful
Thus, we use target actor and critic networks, which interact with the environment and change to be partially but not fully closer to the real actor and critic during training ((large factor)target + (small factor)new)
Algorithm Runthrough and Code
Initialize critic, actor, target critic and actor, replay buffer
For the vision I use a CNN before any other layers (so the most important features of the vision are used by the algorithm)
For each episode
Observe state, select and execute action mu + noise
Get reward, next state
Store (s_t,a_t,r_t, s_(t+1)) in replay buffer
sample rendom minibatch from buffer
Update y_i = reward_i + gamma Q(s given theta)
Evaluate recursively
Update critic to minimize L = y_i — Q(s,a|theta)
Update actor using policy gradient J expected recursive Q given policy
Update targets to be large factor * targets + (1 — large factor) * actual
DDPG does have a few issues. Namely, Critic updates include bellman equation: Q(s,a) = r + max Q(s’a’), but NN as Q network approximators yield lot of noise, and max of noise means we overestimate, thus we become too optimistic about our policy and reward mediocre actions. Notoriously, DPPG also requires extensive hyperparameter tuning (including noise added) and doesn’t guarantee convergence to an optimal solution unless its hyperparameters are within a narrow range.
Innovation 1: Maximum Entropy Reinforcement Learning
Instead of the actor trying to purely maximize reward, the actor now maximizes reward + entropy:
Why use entropy?
Entropy is essentially how uncertain are we of a certain outcome (ex coin max entropy biased coined less entropy coin always heads has 0 entropy: show formula).
By including entropy as a maximization factor, we incentivize wide exploration and thus improves sensitivity to local optima, by allowing for more consistent and stable exploration of high dimensional spaces (why is this better than random noise). Alpha: param that weights how much to prioritize entropy, automatically tuned (how?)
Innovation 2: Two Q functions
This change aims to solve the Bellman overestimation bias of the Q function by training two Q networks independently and using the minimum of the two in policy improvement step,
Two algorithms here (bonus alg layer works on top of any algorithm)
Proximal Policy Optimization (PPO)
Using a different approach to that of DDPG and SAC, our goal is a scalable, data-efficient, robust convergence algorithm (not sensitive to definition of hyperparameters.
Innovation 1: Surrogate Objective Function
The surrogate objective allows off-policy training so we can use a much wider variety of data (especially advantageous to real-world scenarios where vast pre-existing datasets exist).
Before we discuss surrogate objective, the concept of Advantage is critical to understand. Advantage is the:difference between expected reward at s after taking s and expected reward at s. Essentially, it quantifies to what degree an action a better or worse than the ‘average’ action.
We estimate it as A = Q(a,s) — V(a) where Q is action-value (expected return after action a) and V is state-value (expected return from current state), and both are learned
Now, the surrogate objective:
J(θ) = Ê_t [ r_t(θ) Â_t ]
Where:
J(θ) is the surrogate objective
Ê_t […] denotes the empirical average over a finite batch of samples
r_t(θ) = π_θ(a_t|s_t) / π_θ_old(a_t|s_t) is likelihood of action in new policy / likelihood in old policy
Â_t is the estimated advantage at timestep t
This is equivalent to quantifying how well the new policy improves the likelihood of higher return actions and decreases likelihood of lower return actions.
Innovation 2: Clipped Objective Function
This is another way to solve the oversized policy update issue towards more stable learning.
L_CLIP(θ) = E[ min( r(θ) * A, clip(r(θ), 1-ε, 1+ε) * A ) ]
The clipped objective is minimum of the real surrogate and the surrogate where the ratio is clipped between 1 — epsilon and 1 + epsilon (basically trust region of unmodified ratio). Epsilon is usually ~0.1/0.2
It essentially chooses more conservative of clipped and normal ratio.
Our goal here is to create an extra embedding vector input to any other algorithm to give key valuable information and act as a ‘mental model’ of the environment
Innovation: Imagination Vector
The Imagination vector allows us to add an extra embedding vector to our agent’s observations to encode multiple ‘imagined future runs’ of actions and evaluations of their rewards (goal is to “see the future” and “think before acting”).
How do we calculate it? We use a learned environment approximation function, which tries to simulate the environment (this is called model-based learning because were attempting to learn a model of the environment). We pair this with a rollout policy, which is very simple and fast-executing policy (usually random) to decide on actions by which to “explore the future”. By running the environment approximator on the rollout policy, we can explore future actions and their rewars, then find a way to represent all these imagined future actions and rewards in one vector. A notable drawback to note: as you’d expect, it adds a lot of training and makes large amounts of data more necessary.
Combined I2A-PPO Algorithm Runthrough and Code
Every time we collect observations for PPO:
Initialize environment model and rollout pollicy
For multiple ‘imagined runs’:
run environment model starting from current state and deciding with rollout policy until a horizon to yield an imagination trajectory (s, a, r sequence)
Imagination encoder: turns multiple of these imagined trajectories into a single input embedding for the actual decision making network
Decision Transformer
Our goal here is to use the advantage of transformer architecture for reinforcement learning. With Decision Transformer, we can identify important rewards among sparse/distracting rewards, enjoy a wider distribution modeling for greater generalization and knowledge transfer, and learn from pre-obtained suboptimal limited data (called offline learning).
For Decision Transformers, we essentially cast Reinforcement Learning as sequence modeling problem.
Innovation 1: Transformers
If you want to truly understand transformers, I recommend the karpathy building GP2 from scratch video. Here’s a quick Transformers review as it applies to DT:
We have sequences of tokens representing states, actions, returns to go (the sum of future rewards expected to be received), and timesteps. Our goal is now to take in a sequence of tokens and predict the next action: this will act as our policy.
These tokens all have keys, values, and queries that we combine using intricate networks to express relationships between each element. We then combine these relationships into an ‘embedding’ vector which encodes the relationships between the inputs. This process is known as Attention.
Note that a ‘causal self-attention mask’ ensures embeddings can only relate to embeddings that came before them in the sequence, so we can’t use the future to predict the future, use the past information to predict the future (since our goal is to predict next action).
Once we have this embedding vector, we pass it through neural network layers (the analogy Karpathy uses is that here, we ‘reason about relationships’ between the tokens).
These two combined (find relationships between tokens with Attention, reason about relationships with our NN layers) are one head of Transformers, which we stack on itself many times. At the end of these heads, we use a learned neural network layer to convert the output to our action space size and requirements.
By the way, at inference time, we predefine returns to go as our desired total reward at the end.
Algorithm Runthrough and Code
For (R,s,a,t) in dataloader
Predict action
Model converts obs, vision (with convnet layer), rtg, and timestep to unique embeddings and adds timestep embedding to the others
All three used as input to the transformer layers, at the end use action embedding
compute MSEloss (a_pred-a)**2
Perform SGD on the decision transformer model with the gradient of params wrt this loss
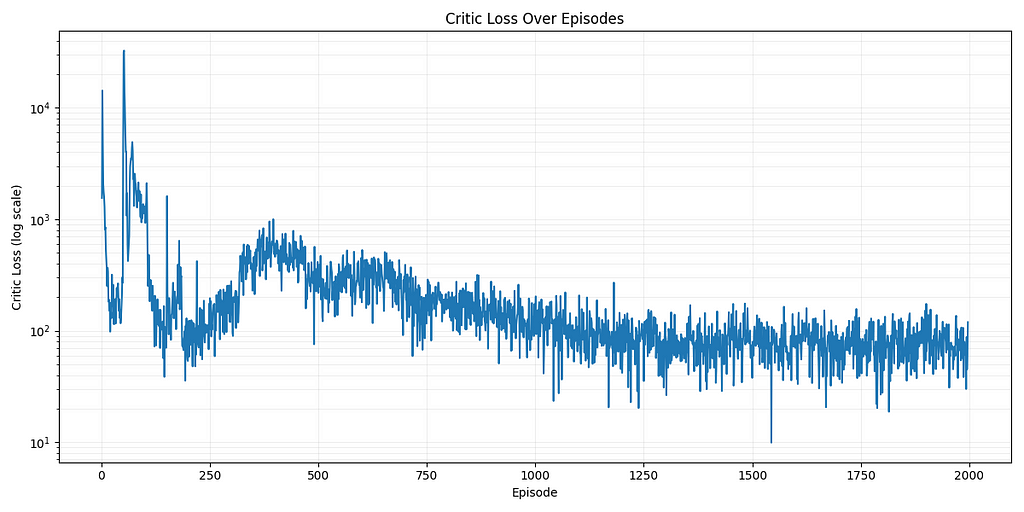
To train these models, I ran the algorithms on an NVIDIA RTX 4090 to take advantage of these algorithms GPU acceleration innovations. Thank you vast.ai! Here are the loss curves:
DDPG Loss (2000 Episodes)
Matplotlib Loss Chart, me
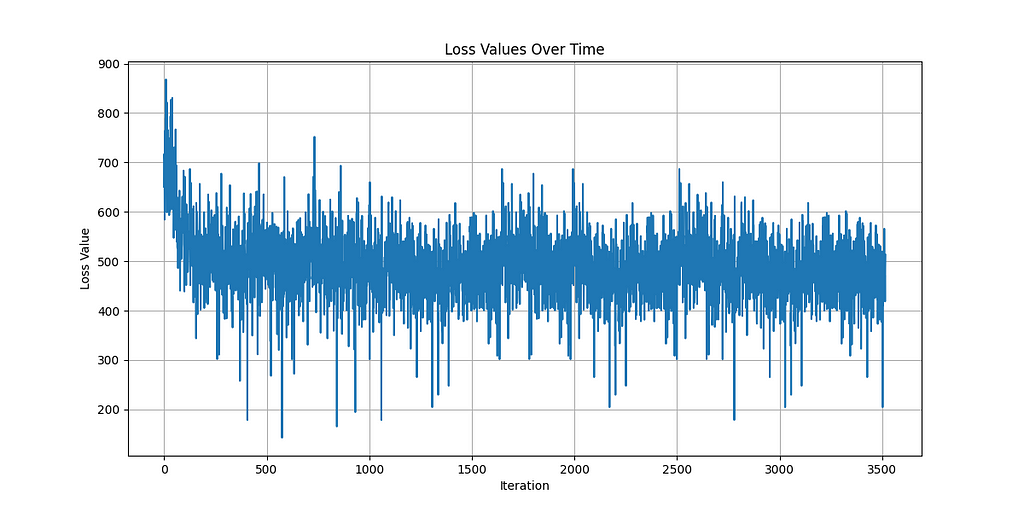
I2APPO Loss (3500 Episodes)
Matplotlib Loss Chart, me
SAC Loss (5000 Episodes)
Matplotlib Loss Chart, me
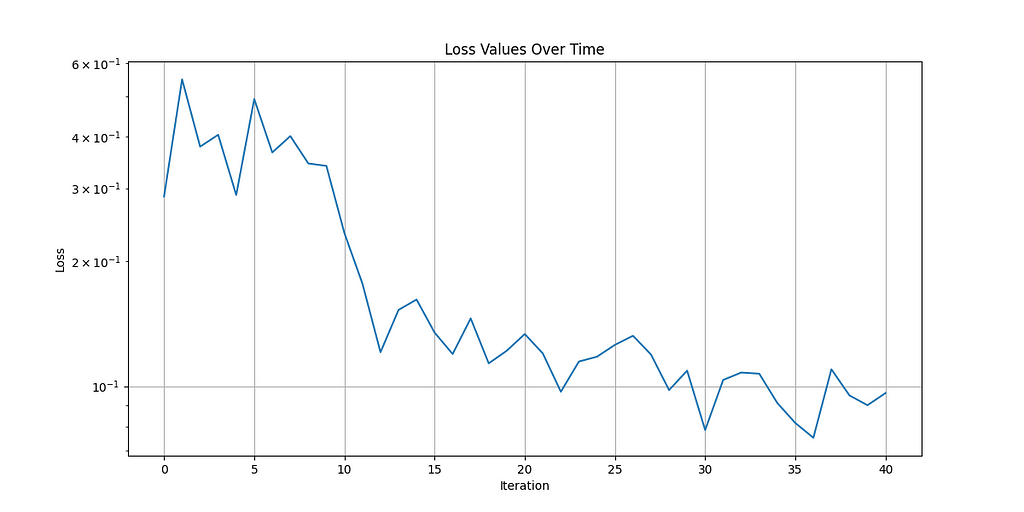
Decision Transformer Loss (1600 Episodes, loss recorded every 40)
Matplotlib Loss Chart, me
By comparing the algorithms’ results (subjectively and weighted by time taken to train), I found Decision Transformer to perform the best! This makes sense considering DT is built specifically to take advantage of GPUs. Watch the video I made to see the algorithms’ actual performance. The models learned to crawl and stop falling over but still had a ways to go before they would be expert fighters.
Areas of Improvement:
I learned just how hard training a humanoid is. We’re operating in both a high-dimensional input space (both visual RGB and actuator positions/velocities) combined with an incredibly high-dimensional output space (27-dimensional continuous space).
From the beginning, the best I was hoping for was that they crawl to each other and touch swords, though even this was a challenge. Most of the training runs didn’t even get to experience the high reward of touching ones sword to the opponent, since walking alone was too hard.
The main dimension for improvement is simply increasing the time to train and amount of compute used. As we’ve seen in the modern AI revolution, these increased compute and data trends seem to have no upper limit!
Most importantly, I learned a lot! For next time, I would use NVIDIA’s skill embeddings or Lifelong Learning to allow the robots to learn to walk before they learn to fight!
To see the video I made walking through the process of creating this project, and see the robots fight, see this video below:
Thanks for making it to the end! Find me on Twitter @AlmondGodd if you’re interested in more!
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept”, you consent to the use of ALL the cookies.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duration
Description
cookielawinfo-checkbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checkbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.