If you’re craving a good mystery this Thanksgiving, try these three excellent British crime shows starring Wicked’s Jonathan Bailey and Wonka’s Olivia Colman.
Your guide to the web’s new LLM-ready content standard
You might’ve seen various dev tools adding LLMs.txt support to their docs recently. This proposed web standard is quickly gaining adoption, but what is it exactly and why does it matter?
While robots.txt and sitemap.xml are designed for search engines, LLMs.txt is optimized for reasoning engines. It provides information about a website to LLMs in a format they can easily understand.
So, how did LLMs.txt go from proposal to industry trend practically overnight?
On November 14th, Mintlify added LLMs.txt support to their docs platform. In one move, they made thousands of dev tools’ docs LLM-friendly, like Anthropic and Cursor.
Anthropic and others quickly posted on X about their LLMs.txt support. More Mintlify-hosted docs joined in, creating a wave of visibility for the proposed standard.
The momentum sparked new community sites and tools. @ifox created directory.llmstxt.cloud to index LLM-friendly technical docs. @screenfluent followed shortly with llmstxt.directory.
Mot, who made dotenvx, built and shared an open-source generator tool for dotenvx’s docs site. Eric Ciarla of Firecrawl created a tool that scrapes your website and creates the file for you.
Who created LLMs.txt and why?
Jeremy Howard, co-founder of Answer.AI, proposed LLMs.txt to solve a specific technical challenge.
AI systems can only process limited context windows, making it difficult for them to understand large documentation sites. Traditional SEO techniques are optimized for search crawlers rather than reasoning engines, and so they can’t solve this limitation.
When AI systems try to process HTML pages directly, they get bogged down with navigation elements, JavaScript, CSS, and other non-essential info that reduces the space available for actual content.
LLMs.txt solves that by giving the AI the exact information it needs in a format it understands.
What exactly is an LLMs.txt file?
LLMs.txt is a markdown file with a specific structure. The specification defines two distinct files:
/llms.txt: A streamlined view of your documentation navigation to help AI systems quickly understand your site’s structure
/llms-full.txt: A comprehensive file containing all your documentation in one place
/llms.txt
The file must start with an H1 project name, followed by a blockquote summary. Subsequent sections use H2 headers to organize documentation links. The “Optional” section specifically marking less critical resources.
# Project Name > Brief project summary
Additional context and important notes
## Core Documentation - [Quick Start](url): Description of the resource - [API Reference](url): API documentation details
## Optional - [Additional Resources](url): Supplementary information
For a simple example, see llmtxt.org’s own LLM.txt. For an in-depth, multi-language example, see Anthropic’s.
/llms-full.txt
While /llms.txt provides navigation and structure, /llms-full.txt contains the complete documentation content in markdown.
# AI Review (Beta)
AI Review is a feature that allows you to review your recent changes in your codebase to catch any potential bugs.
You can click into individual review items to see the full context in the editor, and chat with the AI to get more information.
### Custom Review Instructions
In order for AI Review to work in your favor, you can provide custom instructions for the AI to focus on. For example, if you want the AI to focus on performance-related issues, you could put:
``` focus on the performance of my code ```
This way, AI Review will focus on the performance of your code when scanning through your changes.
### Review Options
Currently, you have a several options to choose from to review:
* `Review Working State` * This will review your uncommitted changes. * `Review Diff with Main Branch` * This will review the diff between your current working state and the main branch. * `Review Last Commit` * This will review the last commit you made.
The above snippet is from Cursor’s /llms-full.txt file. See the full file on Cursor’s docs.
LLMs.txt vs sitemap.xml vs robots.txt
It serves a fundamentally different purpose than existing web standards like sitemap.xml and robots.txt.
/sitemap.xml lists all indexable pages, but doesn’t help with content processing. AI systems would still need to parse complex HTML and handle extra info, cluttering up the context window.
/robots.txt suggests search engine crawler access, but doesn’t assist with content understanding either.
/llms.txt solves AI-related challenges. It helps overcome context window limitations, removes non-essential markup and scripts, and presents content in a structure optimized for AI processing.
How to use LLMs.txt with AI systems
Unlike search engines that actively crawl the web, current LLMs don’t automatically discover and index LLMs.txt files.
You must manually provide the file content to your AI system. This can be done by pasting the link, copying the file contents directly into your prompt, or using the AI tool’s file upload feature.
ChatGPT
First, go to that docs’ or /llms-full.txt URL. Copy the contents or URL into your chat. Ask specific questions about what you’d like to accomplish.
A screenshot of using an llms-full.txt file with ChatGPT (Image by author).
Claude
Claude can’t yet browse the web, so copy the contents of that docs’ /llms-full.txt file into your clipboard. Alternatively, you can save it as a .txt file and upload it. Now you can ask any questions you like confident that it has the full, most up-to-date context.
A screenshot of using an llms-full.txt file with Claude (Image by author).
Cursor
Cursor lets you add and index third party docs and use them as context in your chats. You can do this by typing @Docs > Add new doc. A modal will appear and it’s here where you can add a link to the /llms-full.txt file. You will be able to use it as context like any other doc.
To learn more about this feature see Cursor’s @Docs feature.
A screenshot of inputting a llms-full.txt file into Cursor to use as context (Image by author).
How to generate LLMs.txt files
There are several different tools you can use to create your own:
Mintlify: Automatically generates both /llms.txt and /llms-full.txt for hosted documentation
llmstxt by dotenv: A tool by dotenvx’s creator Mot that generates llms.txt using your site’s sitemap.xml.
llmstxt by Firecrawl: A different tool by Firecrawl’s founder, Eric Ciarla, that scrapes your website using Firecrawl to generate the llms.txt file.
What’s next for LLMs.txt?
LLMs.txt represents a shift toward AI-first documentation.
Just as SEO became essential for search visibility, having AI-readable content will become crucial for dev tools and docs.
As more sites adopt this file, we’ll likely see new tools and best practices emerge for making content accessible to both humans and AI assistants.
For now, LLMs.txt offers a practical solution to help AI systems better understand and utilize web content, particularly for technical documentation and APIs.
LLMs.txt Explained was originally published in Towards Data Science on Medium, where people are continuing the conversation by highlighting and responding to this story.
Imagine you are a hungry hiker, lost on a trail away from the city. After walking many miles, you find a road and spot a faint outline of a car coming towards you. You mentally prepare a sympathy pitch for the driver, but your hope turns to horror as you realize the car is driving itself. There is no human to showcase your trustworthiness, or seek sympathy from.
Deciding against jumping in front of the car, you try thumbing a ride, but the car’s software clocks you as a weird pedestrian and it whooses past you.
Sometimes having an emergency call button or a live helpline [to satisfy California law requirements] is not enough. Some edge cases require intervention, and they will happen more often as autonomous cars take up more of our roads. Edge cases like these are especially tricky, because they need to be taken on a case by case basis. Solving them isn’t as easy as coding a distressed face classifier, unless you want people posing distressed faces to get free rides. Maybe the cars can make use of human support, ‘tele-guidance’ as Zoox calls it, to vet genuine cases while also ensuring the system is not taken advantage of, a realistically boring solution that would work… for now. An interesting development in autonomous car research holds the key to a more sophisticated solution.
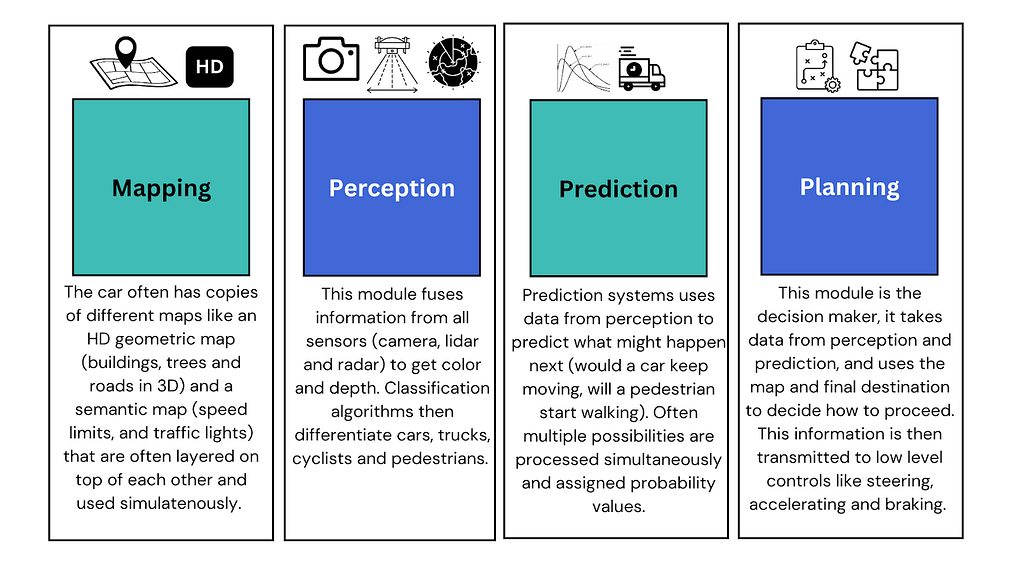
Typically an autonomous driving algorithm works by breaking down driving into modular components and getting good at them. This breakdown looks different in different companies but a popular one that Waymo and Zoox use, has modules for mapping, perception, prediction, and planning.
Figure 1: The base modules that are at the core of traditional self-driving cars. Source: Image by author.
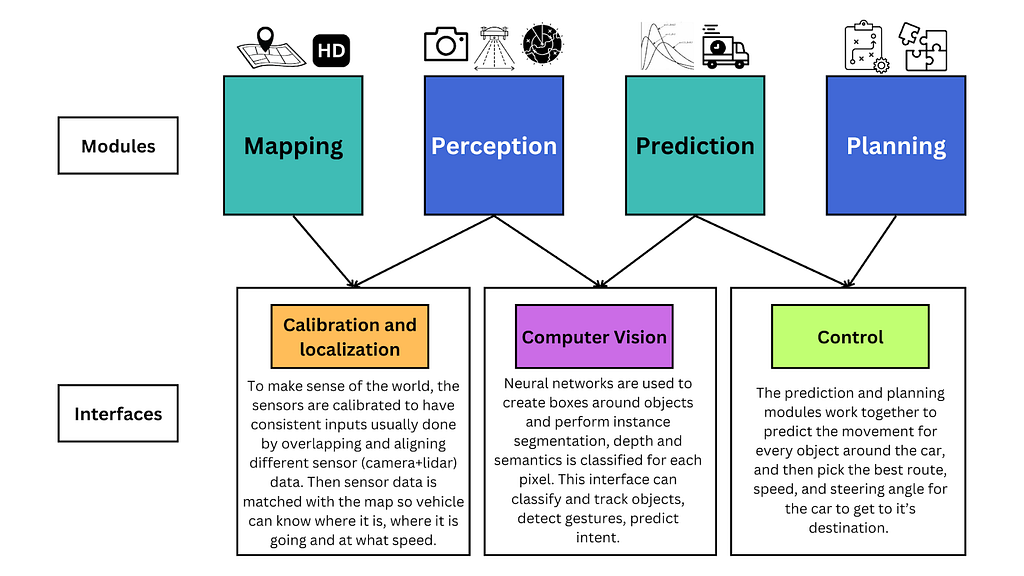
Each of these modules only focus on the one function which they are heavily trained on, this makes them easier to debug and optimize. Interfaces are then engineered on top of these modules to connect them and make them work together.
Figure 2: A simplification of how modules are connected through interfaces. Source: Image by author.
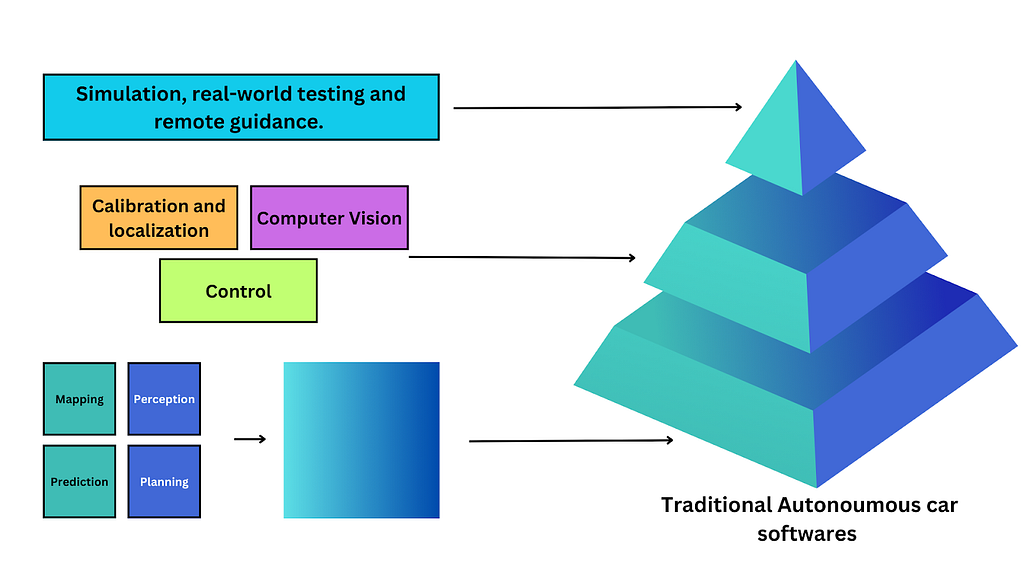
After connecting these modules using the interfaces, the pipeline is then further trained on simulations and tested in the real world.
Figure 3: How the different software pieces in self-driving cars come together. Source: Image by author.
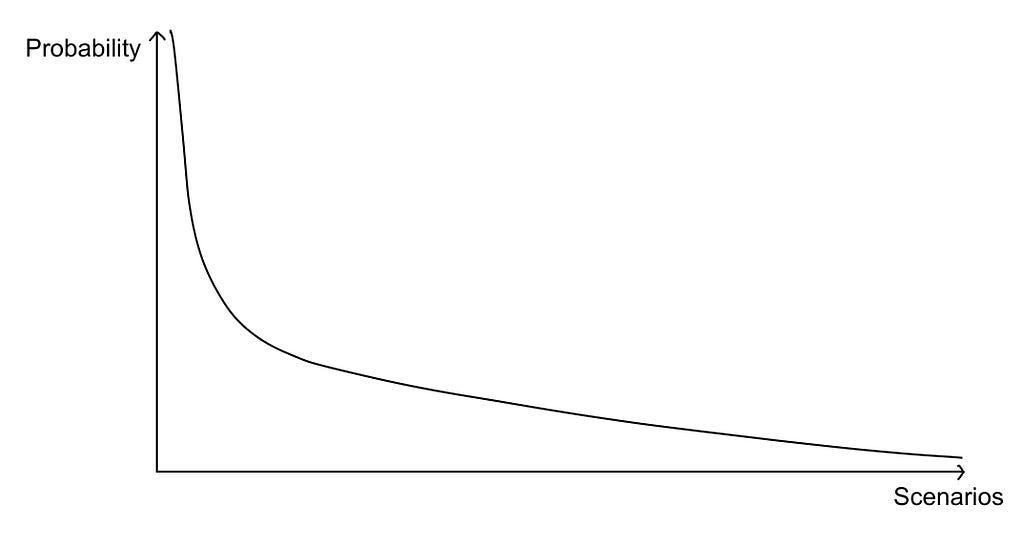
This approach works well, but it is inefficient. Since each module is trained separately, the interfaces often struggle to make them work well together. This means the cars adapt badly to novel environments. Often cumulative errors build up among modules, made worse by inflexible pre-set rules. The answer might seem to just train them on less likely scenarios, which seems plausible intuitively but is actually quite implausible. This is because driving scenarios fall under a long tailed distribution.
Figure 4: A long tail distribution, showcasing that training the car on less likely scenarios gets diminishing marginal returns the further you go. Source: Image by author.
This means we have the most likely scenarios that are easily trained, but there are so many unlikely scenarios that trying to train our model on them is exceptionally computationally expensive and time consuming only to get marginal returns. Scenarios like an eagle nose diving from the sky, a sudden sinkhole formation, a utility pole collapsing, or driving behind a car with a blown brake light fuse. With a car only trained on highly relevant data, with no worldly knowledge, which struggles to adapt to novel solutions, this means an endless catch-up game to account for all these implausible scenarios, or worse, being forced to add more training scenarios when something goes very wrong.
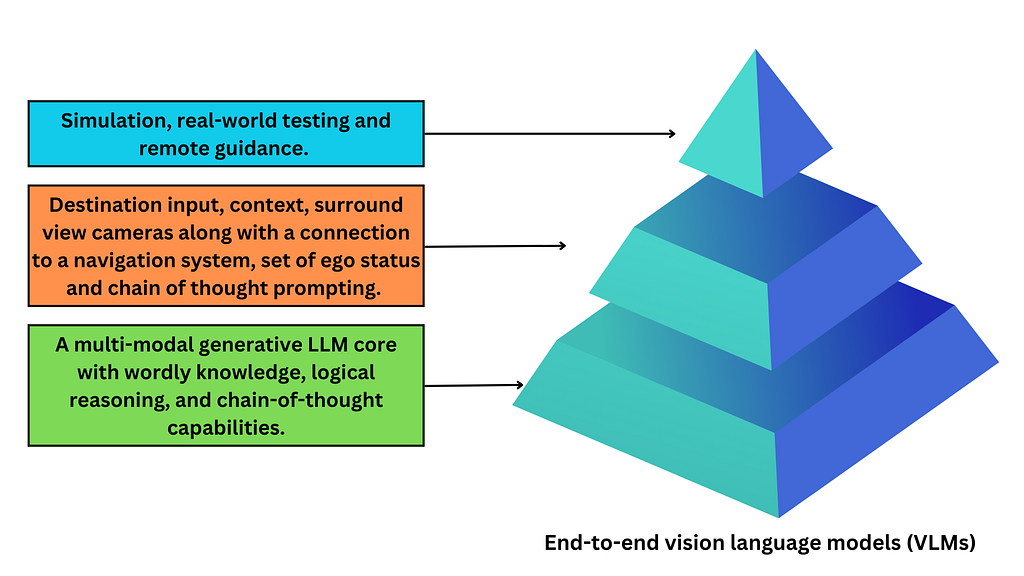
Two weeks ago, Waymo Research published a paper on EMMA, an end-to-end multimodal model which can turn the problem on its head. This end-to-end model instead of having modular components, would include an all knowing LLM with all its worldly knowledge at the core of the model, this LLM would then be further fine-tuned to drive. For example Waymo’s EMMA is built on top of Google’s Gemini while DriveGPT is built on top of OpenAI’s ChatGPT.
This core is then trained using elaborate prompts to provide context and ask questions to deduce its spatial reasoning, road graph estimation, and scene understanding capabilities. The LLMs are also asked to offer decoded visualizations, to analyze whether the textual explanation matches up with how the LLM would act in a simulation. This multimodal infusion with language input makes the training process much more simplified as you can have simultaneous training of multiple tasks with a single model, allowing for task-specific predictions through simple variations of the task prompt.
Figure 5: How an end-to-end Vision Language Model is trained to drive. Source: Image by author.
Another interesting input is often an ego variable, which has nothing to do with how superior the car feels but rather stores data like the car’s location, velocity, acceleration and orientation to help the car plan out a route for smooth and consistent driving. This improves performance through smoother behavior transitions and consistent interactions with surrounding agents in multiple consecutive steps.
These end-to-end models, when tested through simulations, give us a state-of-the-art performance on public benchmarks. How does GPT knowing how to file a 1040 help it drive better? Worldly knowledge and logical reasoning capabilities means better performance in novel situations. This model also lets us co-train on tasks, which outperforms single task models by more than 5.5%, an improvement despite much less input (no HD map, no interfaces, and no access to lidar or radar). They are also much better at understanding hand gestures, turn signals, or spoken commands from other drivers and are socially adept at evaluating driving behaviors and aggressiveness of surrounding cars and adjust their predictions accordingly. You can also ask them to justify their decisions which gets us around their “black box” nature, making validation and traceability of decisions much easier.
In addition to all this, LLMs can also help with creating simulations that they can then be tested on, since they can label images and can receive text input to create images. This can significantly simplify constructing an easily controllable setting for testing and validating the decision boundaries of autonomous driving systems and simulating a variety of driving situations.
This approach is still slower, can input limited image frames and is more computationally extensive but as our LLMs get better, faster, less computationally expensive and incorporate additional modalities like lidar and radar, we will see this multimodal approach surpass specialized expert models in 3D object detection quality exponentially, but that might be a few years down the road.
As end-to-end autonomous cars drive for longer it would be interesting to see how they imprint on the human drivers around them, and develop a unique ‘auto-temperament’ or personality in each city. It would be a fascinating case study of driving behaviours around the world. It would be even more fascinating to see how they impact the human drivers around them.
An end-to-end system would also mean being able to have a conversation with the car, like you converse with ChatGPT, or being able to walk up to a car on the street and ask it for directions. It also means hearing less stories from my friends, who vow to never sit in a Waymo again after it almost ran into a speeding ambulance or failed to stop for a low flying bird.
Imagine an autonomous car not just knowing where it is at what time of day (on a desolate highway close to midnight) but also understanding what that means (the pedestrian is out of place and likely in trouble). Imagine a car not just being able to call for help (because California law demands it) but actually being the help because it can logically reason with ethics. Now that would be a car that would be worth the ride.
References:
Chen, L., Sinavski, O., Hünermann, J., Karnsund, A., Willmott, A. J., Birch, D., Maund, D., & Shotton, J. (2023). Driving with LLMs: Fusing Object-Level Vector Modality for Explainable Autonomous Driving (arXiv:2310.01957). arXiv. https://doi.org/10.48550/arXiv.2310.01957
Cui, C., Ma, Y., Cao, X., Ye, W., Zhou, Y., Liang, K., Chen, J., Lu, J., Yang, Z., Liao, K.-D., Gao, T., Li, E., Tang, K., Cao, Z., Zhou, T., Liu, A., Yan, X., Mei, S., Cao, J., … Zheng, C. (2024). A Survey on Multimodal Large Language Models for Autonomous Driving. 2024 IEEE/CVF Winter Conference on Applications of Computer Vision Workshops (WACVW), 958–979. https://doi.org/10.1109/WACVW60836.2024.00106
Fu, D., Lei, W., Wen, L., Cai, P., Mao, S., Dou, M., Shi, B., & Qiao, Y. (2024). LimSim++: A Closed-Loop Platform for Deploying Multimodal LLMs in Autonomous Driving (arXiv:2402.01246). arXiv. https://doi.org/10.48550/arXiv.2402.01246
Hwang, J.-J., Xu, R., Lin, H., Hung, W.-C., Ji, J., Choi, K., Huang, D., He, T., Covington, P., Sapp, B., Zhou, Y., Guo, J., Anguelov, D., & Tan, M. (2024). EMMA: End-to-End Multimodal Model for Autonomous Driving (arXiv:2410.23262). arXiv. https://doi.org/10.48550/arXiv.2410.23262
The ‘full-stack’: Behind autonomous driving. (n.d.). Zoox. Retrieved November 26, 2024, from https://zoox.com/autonomy
Wang, B., Duan, H., Feng, Y., Chen, X., Fu, Y., Mo, Z., & Di, X. (2024). Can LLMs Understand Social Norms in Autonomous Driving Games? (arXiv:2408.12680). arXiv. https://doi.org/10.48550/arXiv.2408.12680
Wang, Y., Jiao, R., Zhan, S. S., Lang, C., Huang, C., Wang, Z., Yang, Z., & Zhu, Q. (2024). Empowering Autonomous Driving with Large Language Models: A Safety Perspective (arXiv:2312.00812). arXiv. https://doi.org/10.48550/arXiv.2312.00812
Xu, Z., Zhang, Y., Xie, E., Zhao, Z., Guo, Y., Wong, K.-Y. K., Li, Z., & Zhao, H. (2024). DriveGPT4: Interpretable End-to-end Autonomous Driving via Large Language Model (arXiv:2310.01412). arXiv. https://doi.org/10.48550/arXiv.2310.01412
Yang, Z., Jia, X., Li, H., & Yan, J. (n.d.). LLM4Drive: A Survey of Large Language Models for Autonomous Driving.
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept”, you consent to the use of ALL the cookies.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duration
Description
cookielawinfo-checkbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checkbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.