Bitwise, one of the listed companies that issued Bitcoin spot ETF in January, has proposed the crypto mixed-based ETF to the authorities. According to the S-1 filling document on Nov 26, Bitwise Asset Management proposed the Bitcoin-Ethereum-based spot ETF to the Securities…
The crypto world is buzzing, and all eyes are on Lightchain Protocol AI, the newest Layer 1 blockchain that’s capturing massive attention with its explosive LCAI token ICO. It’s been a while since the market has seen a truly innovative Layer 1 platform, and Lightchain Protocol AI is blowing up with a presale that has […]
AVAX’s breakout from a long-term downtrend underlined potential for a rally beyond the $45 resistance zone
Active addresses surged by 28.56%, reinforcing bullish network activity trends
VET’s breakout from the descending channel faced a $0.037 retest.
Technical indicators and bearish sentiment signaled consolidation before any potential recovery.
Leading web3 launchpad, overHere is working with internet personality Hailey Welch to launch her Hawk Tuah ($HAWK) meme coin. On an episode of her talk show Talk Tuah with billionaire Mark Cuban, Hailey Welch announced that she was officially launching the $HAWK meme coin. Hailey is partnering with OverHere to launch a unique meme coin […]
Why computer hardware and AI algorithms are being reinvented using inspiration from the brain
euromorphic Computing might not just help bring AI to the edge, but also reduce carbon emissions at data centers. Generated by author with ImageGen 3.
There are periodic proclamations of the coming neuromorphic computing revolution, which uses inspiration from the brain to rethink neural networks and the hardware they run on. While there remain challenges in the field, there have been solid successes and continues to be steady progress in spiking neural network algorithms and neuromorphic hardware. This progress is paving the way for disruption in at least some sectors of artificial intelligence and will reduce the energy consumption per computation at inference and allow artificial intelligence to be pushed further out to the edge. In this article, I will cover some neuromorphic computing and engineering basics, training, the advantages of neuromorphic systems, and the remaining challenges.
The classical use case of neuromorphic systems is for edge devices that need to perform the computation locally and are energy-limited, for example, battery-powered devices. However, one of the recent interests in using neuromorphic systems is to reduce energy usage at data centers, such as the energy needed by large language models (LLMs). For example, OpenAI signed a letter of intent to purchase $51 million of neuromorphic chips from Rain AI in December 2023. This makes sense since OpenAI spends a lot on inference, with one estimate of around $4 billion on running inference in 2024. It also appears that both Intel’s Loihi 2 and IBM’s NorthPole (successor to TrueNorth) neuromorphic systems are designed for use in servers.
The promises of neuromorphic computing can broadly be divided into 1) pragmatic, near-term successes that have already found successes and 2) more aspirational, wacky neuroscientist fever-dream ideas of how spiking dynamics might endow neural networks with something closer to real intelligence. Of course, it’s group 2 that really excites me, but I’m going to focus on group 1 for this post. And there is no more exciting way to start than to dive into terminology.
Terminology
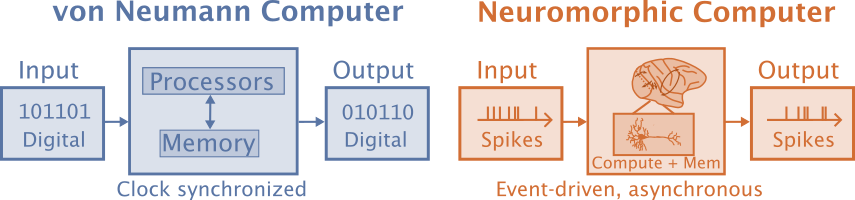
Neuromorphic computation is often defined as computation that is brain-inspired, but that definition leaves a lot to the imagination. Neural networks are more neuromorphic than classical computation, but these days neuromorphic computation is specifically interested in using event-based spiking neural networks (SNNs) for their energy efficiency. Even though SNNs are a type of artificial neural network, the term “artificial neural networks” (ANNs) is reserved for the more standard non-spiking artificial neural networks in the neuromorphic literature. Schuman and colleagues (2022) define neuromorphic computers as non-von Neuman computers where both processing and memory are collocated in artificial neurons and synapses, as opposed to von Neuman computers that separate processing and memory.
von Neumann Computers operate on digital information, have separate processors and memory, and are synchronized by clocks, while neuromorphic computers operate on event-driven spikes, combine compute and memory, and are asynchronous. Created by the author with inspiration from Schuman et al. 2022.
Neuromorphic engineering means designing the hardware while “neuromorphic computation” is focused on what is being simulated rather than what it is being simulated on. These are tightly intertwined since the computation is dependent on the properties of the hardware and what is implemented in hardware depends on what is empirically found to work best.
Another related term is NeuroAI, the goal of which is to use AI to gain a mechanistic understanding of the brain and is more interested in biological realism. Neuromorphic computation is interested in neuroscience as a means to an end. It views the brain as a source of ideas that can be used to achieve objectives such as energy efficiency and low latency in neural architectures. A decent amount of the NeuroAI research relies on spike averages rather than spiking neural networks, which allows closer comparison of the majority of modern ANNs that are applied to discrete tasks.
Event-Driven Systems
Generated by the author using ImageGen 3.
Neuromorphic systems are event-based, which is a paradigm shift from how modern ANN systems work. Even real-time ANN systems typically process one frame at a time, with activity synchronously propagated from one layer to the next. This means that in ANNs, neurons that carry no information require the same processing as neurons that carry critical information. Event-driven is a different paradigm that often starts at the sensor and applies the most work where information needs to be processed. ANNs rely on matrix operations that take the same amount of time and energy regardless of the values in the matrices. Neuromorphic systems use SNNs where the amount of work depends on the number of spikes.
A traditional deployed ANN would often be connected to a camera that synchronously records a frame in a single exposure. The ANN then processes the frame. The results of the frame might then be fed into a tracking algorithm and further processed.
Event-driven systems may start at the sensor with an event camera. Each pixel sends updates asynchronously whenever a change crosses a threshold. So when there is movement in a scene that is otherwise stationary, the pixels that correspond to the movement send events or spikes immediately without waiting for a synchronization signal. The event signals can be sent within tens of microseconds, while a traditional camera might collect at 24 Hz and could introduce a latency that’s in the range of tens of milliseconds. In addition to receiving the information sooner, the information in the event-based system would be sparser and would focus on the movement. The traditional system would have to process the entire scene through each network layer successively.
Learning in Spiking Neural Networks
One way to train a spiking neural network is to use an ANN as a teacher. Generated by the author with ImageGen 3.
One of the major challenges of SNNs is training them. Backpropagation algorithms and stochastic gradient descent are the go-to solutions for training ANNs, however, these methods run into difficulty with SNNs. The best way to train SNNs is not yet established and the following methods are some of the more common approaches that are used:
ANN to SNN conversion
Backpropagation-like
Synaptic plasticity
Evolutionary
ANN to SNN conversion
One method of creating SNNs is to bypass training the SNNs directly and instead train ANNs. This approach limits the types of SNNs and hardware that can be used. For example, Sengupta et al. (2019) converted VGG and ResNets to ANNs using an integrate-and-fire (IF) neuron that does not have a leaking or refractory period. They introduce a novel weight-normalization technique to perform the conversion, which involves setting the firing threshold of each neuron based on its pre-synaptic weights. Dr. Priyadarshini Panda goes into more detail in her ESWEEK 2021 SNN Talk.
Advantages:
Enables deep SNNs.
Allows reuse of deep ANN knowledge, such as training, architecture, etc.
Disadvantages:
Limits architectures to those suited to ANNs and the conversion procedures.
Network doesn’t learn to take advantage of SNN properties, which can lead to lower accuracy and longer latency.
Backpropagation-like approaches and surrogate gradient descent
The most common methods currently used to train SNNs are backpropagation-like approaches. Standard backpropagation does not work to train SNNs because 1) the spiking threshold function’s gradient is nonzero except at the threshold where it is undefined and 2) the credit assignment problem needs to be solved in the temporal dimension in addition spatial (or color etc).
In ANNs, the most common activation function is the ReLU. For SNNs, the neuron will fire if the membrane potential is above some threshold, otherwise, it will not fire. This is called a Heaviside function. You could use a sigmoid function instead, but then it would not be a spiking neural network. The solution of using surrogate gradients is to use the standard threshold function in the forward pass, but then use the derivative from a “smoothed” version of the Heaviside function, such as the sigmoid function, in the backward pass (Neftci et al. 2019, Bohte 2011).
Advantages:
Connects to well-known methods.
Compared to conversion, can result in a more energy efficient network (Li et al. 2022)
Disadvantages:
Can be computationally intensive to solve both spatially and through time
Synaptic Plasticity
Spike-timing-dependent plasticity (STDP) is the most well-known form of synaptic plasticity. In most cases, STDP increases the strength of a synapse when a presynaptic (input) spike comes immediately before the postsynaptic spike. Early models have shown promise with STDP on simple unsupervised tasks, although getting it to work well for more complex models and tasks has proven more difficult.
Other biological learning mechanisms include the pruning and creation of both neurons and synapses, homeostatic plasticity, neuromodulators, astrocytes, and evolution. There is even some recent evidence that some primitive types of knowledge can be passed down by epigenetics.
Advantages:
Unsupervised
Can take advantage of temporal properties
Biologically inspired
Disadvantages:
Synaptic plasticity is not well understood, especially at different timescales
Difficult to get to work with non-trivial networks
Evolutionary Optimization
Evolutionary optimization is another approach that has some cool applications that works well with small networks. Dr. Catherine Schuman is a leading expert and she gave a fascinating talk on neuromorphic computing to the ICS lab that is available on YouTube.
Advantages:
Applicable to many tasks, architectures, and devices.
Can learn topology and parameters (requiring less knowledge of the problem).
Learns small networks which results in lower latency.
Disadvantages:
Not effective for problems that require deep or large architectures.
Advantages of Neuromorphic Systems
Energy Efficiency
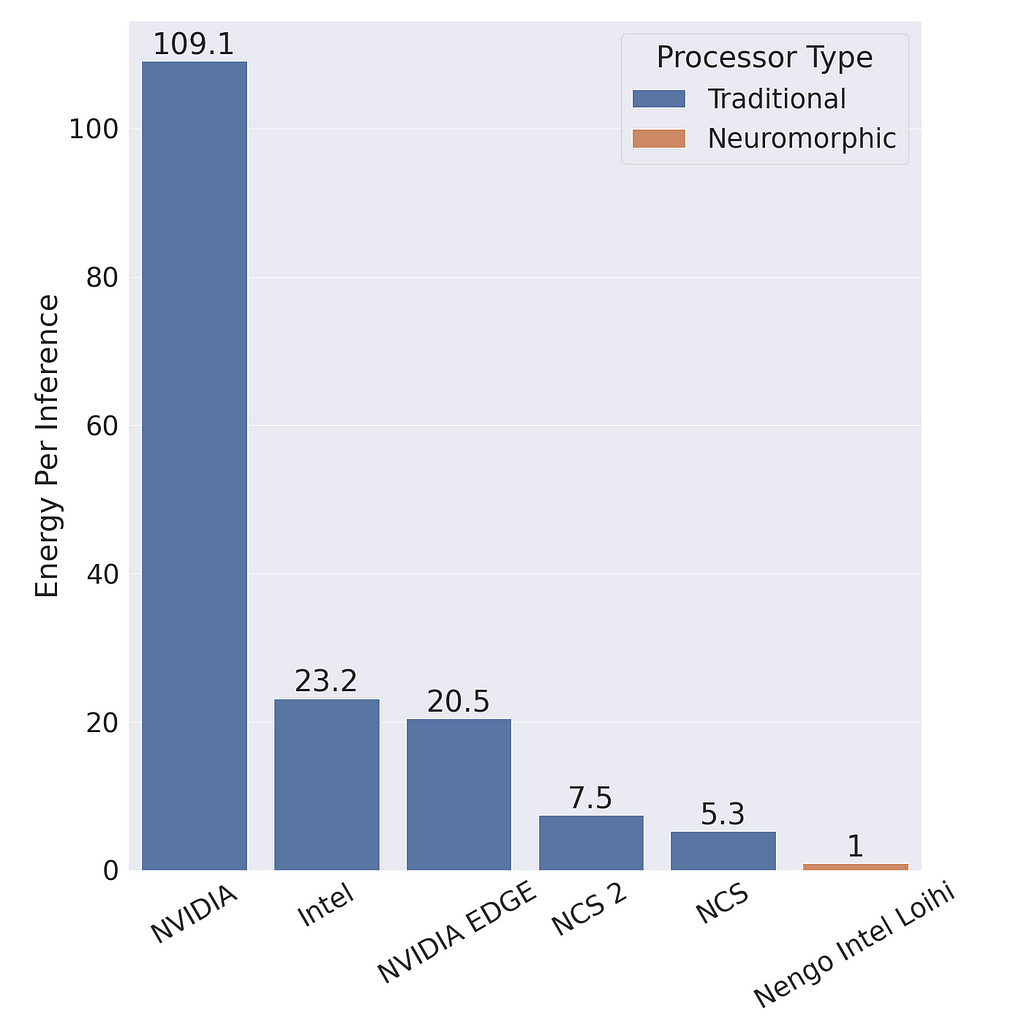
Neuromorphic systems have two main advantages: 1) energy efficiency and 2) low latency. There are a lot of reasons to be excited about the energy efficiency. For example, Intel claimed that their Loihi 2 Neural Processing Unit (NPU) can use 100 times less energy while being as much as 50 times faster than conventional ANNs. Chris Eliasmith compared the energy efficiency of an SNN on neuromorphic hardware with an ANN with the same architecture on standard hardware in a presentation available on YouTube. He found that the SNN is 100 times more energy efficient on Loihi compared to the ANN on a standard NVIDIA GPU and 20 times more efficient than the ANN on an NVIDIA Jetson GPU. It is 5–7 times more energy efficient than the Intel Neural Compute Stick (NCS) and NCS 2. At the same time the SNN achieves a 93.8% accuracy compared to the 92.7% accuracy of the ANN.
Figure recreated by author from Chris Eliasmith’s slides at https://www.youtube.com/watch?v=PeW-TN3P1hk&t=1308s which shows the neuromorphic processor being 5–100x more efficient while achieving a similar accuracy.
Neuromorphic chips are more energy efficient and allow complex deep learning models to be deployed on low-energy edge devices. In October 2024, BrainChip introduced the Akida Pico NPU which uses less than 1 mW of power, and Intel Loihi 2 NPU uses 1 W. That’s a lot less power than NVIDIA Jetson modules that use between 10–50 watts which is often used for embedded ANNs and server GPUs can use around 100 watts.
Comparing the energy efficiency between ANNs and SNNs are difficult because: 1. energy efficiency is dependent on hardware, 2. SNNs and ANNs can use different architectures, and 3. they are suited to different problems. Additionally, the energy used by SNNs scales with the number of spikes and the number of time steps, so the number of spikes and time steps needs to be minimized to achieve the best energy efficiency.
Theoretical analysis is often used to estimate the energy needed by SNNs and ANNs, however, this doesn’t take into account all of the differences between the CPUs and GPUs used for ANNs and the neuromorphic chips for SNNs.
Looking into nature can give us an idea of what might be possible in the future and Mike Davies provided a great anecdote in an Intel Architecture All Access YouTube video:
Consider the capabilities of a tiny cockatiel parrot brain, a two-gram brain running on about 50 mW of power. This brain enables the cockatiel to fly at speeds up to 20 mph, to navigate unknown environments while foraging for food, and even to learn to manipulate objects as tools and utter human words.
In current neural networks, there is a lot of wasted computation. For example, an image encoder takes the same amount of time encoding a blank page as a cluttered page in a “Where’s Waldo?” book. In spiking neural networks, very few units would activate on a blank page and very little computation would be used, while a page containing a lot of features would fire a lot more units and use a lot more computation. In real life, there are often regions in the visual field that contain more features and require more processing than other regions that contain fewer features, like a clear sky. In either case, SNNs only perform work when work needs to be performed, whereas ANNs depend on matrix multiplications that are difficult to use sparsely.
This in itself is exciting. A lot of deep learning currently involves uploading massive amounts of audio or video to the cloud, where the data is processed in massive data centers, spending a lot of energy on the computation and cooling the computational devices, and then the results are returned. With edge computing, you can have more secure and more responsive voice recognition or video recognition, that you can keep on your local device, with orders of magnitude less energy consumption.
Low Latency
When a pixel receptor of an event camera changes by some threshold, it can send an event or spike within microseconds. It doesn’t need to wait for a shutter or synchronization signal to be sent. This benefit is seen throughout the event-based architecture of SNNs. Units can send events immediately, rather than waiting for a synchronization signal. This makes neuromorphic computers much faster, in terms of latency, than ANNs. Hence, neuromorphic processing is better than ANNs for real-time applications that can benefit from low latency. This benefit is reduced if the problem allows for batching and you are measuring speed by throughput since ANNs can take advantage of batching more easily. However, in real-time processing, such as robotics or user interfacing, latency is more important.
Disadvantages and Challenges
Everything Everywhere All at Once
One of the challenges is that neuromorphic computing and engineering are progressing at multiple levels at the same time. The details of the models depend on the hardware implementation and empirical results with actualized models guide the development of the hardware. Intel discovered this with their Loihi 1 chips and built more flexibility into their Loihi 2 chips, however, there will always be tradeoffs and there are still many advances to be made on both the hardware and software side.
Limited Availability of Commercial Hardware
Hopefully, this will change soon, but commercial hardware isn’t very available. BrainChip’s Akida was the first neuromorphic chip to be commercially available, although apparently, it does not even support the standard leaky-integrate and fire (LIF) neuron. SpiNNaker boards used to be for sale, which was part of the EU Human Brain Project but are no longer available. Intel makes Loihi 2 chips available to some academic researchers via the Intel Neuromorphic Research Community (INRC) program.
Datasets
The number of neuromorphic datasets is much less than traditional datasets and can be much larger. Some of the common smaller computer vision datasets, such as MNIST (NMNIST, Li et al. 2017) and CIFAR-10 (CIFAR10-DVS, Orchard et al. 2015), have been converted to event streams by displaying the images and recording them using event-based cameras. The images are collected with movement (or “saccades”) to increase the number of spikes for processing. With larger datasets, such as ES-ImageNet (Lin et al. 2021), simulation of event cameras has been used.
The dataset derived from static images might be useful in comparing SNNs with conventional ANNs and might be useful as part of the training or evaluation pipeline, however, SNNs are naturally temporal, and using them for static inputs does not make a lot of sense if you want to take advantage of SNNs temporal properties. Some of the datasets that take advantage of these properties of SNNs include:
DvsGesture (Amir et al. 2017) — a dataset of people performing a set of 11 hand and arm gestures
Bullying10K (Dong et al. 2024) — a privacy-preserving dataset for bullying recognition
Synthetic data can be generated from standard visible camera data without the use of expensive event camera data collections, however these won’t exhibit the high dynamic range and frame rate that event cameras would capture.
Tonic is an example python library that makes it easy to access at least some of these event-based datasets. The datasets themselves can take up a lot more space than traditional datasets. For example, the training images for MNIST is around 10 MB, while in N-MNIST, it is almost 1 GB.
Another thing to take into account is that visualizing the datasets can be difficult. Even the datasets derived from static images can be difficult to match with the original input images. Also, the benefit of using real data is typically to avoid a gap between training and inference, so it would seem that the benefit of using these datasets would depend on their similarity to the cameras used during deployment or testing.
Conclusion
Created by author with ImageGen 3 and GIMP.
We are in an exciting time with neuromorphic computation, with both the investment in the hardware and the advancements in spiking neural networks. There are still challenges for adoption, but there are proven cases where they are more energy efficient, especially standard server GPUs while having lower latency and similar accuracy as traditional ANNs. A lot of companies, including Intel, IBM, Qualcomm, Analog Devices, Rain AI, and BrainChip have been investing in neuromorphic systems. BrainChip is the first company to make their neuromorphic chips commercially available while both Intel and IBM are on the second generations of their research chips (Loihi 2 and NorthPole respectively). There also seems to have been a particular spike of successful spiking transformers and other deep spiking neural networks in the last couple of years, following the Spikformer paper (Zhou et al. 2022) and the SEW-ResNet paper (Fang et al. 2021).
References
Amir, A., Taba, B., Berg, D., Melano, T., McKinstry, J., Di Nolfo, C., Nayak, T., Andreopoulos, A., Garreau, G., Mendoza, M., Kusnitz, J., Debole, M., Esser, S., Delbruck, T., Flickner, M., & Modha, D. (2017). A Low Power, Fully Event-Based Gesture Recognition System. 7243–7252. https://openaccess.thecvf.com/content_cvpr_2017/html/Amir_A_Low_Power_CVPR_2017_paper.html
Bohte, S. M. (2011). Error-Backpropagation in Networks of Fractionally Predictive Spiking Neurons. In Artificial Neural Networks and Machine Learninghttps://doi.org/10.1007/978-3-642-21735-7_8
Dong, Y., Li, Y., Zhao, D., Shen, G., & Zeng, Y. (2023). Bullying10K: A Large-Scale Neuromorphic Dataset towards Privacy-Preserving Bullying Recognition. Advances in Neural Information Processing Systems, 36, 1923–1937.
Li, C., Ma, L., & Furber, S. (2022). Quantization Framework for Fast Spiking Neural Networks. Frontiers in Neuroscience,16. https://doi.org/10.3389/fnins.2022.918793
Li, H., Liu, H., Ji, X., Li, G., & Shi, L. (2017). CIFAR10-DVS: An Event-Stream Dataset for Object Classification. Frontiers in Neuroscience, 11. https://doi.org/10.3389/fnins.2017.00309
Lin, Y., Ding, W., Qiang, S., Deng, L., & Li, G. (2021). ES-ImageNet: A Million Event-Stream Classification Dataset for Spiking Neural Networks. Frontiers in Neuroscience, 15. [https://doi.org/10.3389/fnins.2021.726582](https://doi.org/10.3389/fnins.2021.726582
Neftci, E. O., Mostafa, H., & Zenke, F. (2019). Surrogate Gradient Learning in Spiking Neural Networks: Bringing the Power of Gradient-Based Optimization to Spiking Neural Networks. IEEE Signal Processing Magazine. https://doi.org/10.1109/MSP.2019.2931595
Orchard, G., Jayawant, A., Cohen, G. K., & Thakor, N. (2015). Converting Static Image Datasets to Spiking Neuromorphic Datasets Using Saccades. Frontiers in Neuroscience, 9. https://doi.org/10.3389/fnins.2015.00437
Schuman, C. D., Kulkarni, S. R., Parsa, M., Mitchell, J. P., Date, P., & Kay, B. (2022). Opportunities for neuromorphic computing algorithms and applications. Nature Computational Science,2(1), 10–19. https://doi.org/10.1038/s43588-021-00184-y
Sengupta, A., Ye, Y., Wang, R., Liu, C., & Roy, K. (2019). Going Deeper in Spiking Neural Networks: VGG and Residual Architectures. Frontiers in Neuroscience, 13. https://doi.org/10.3389/fnins.2019.00095
Zhou, Z., Zhu, Y., He, C., Wang, Y., Yan, S., Tian, Y., & Yuan, L. (2022, September 29). Spikformer: When Spiking Neural Network Meets Transformer. The Eleventh International Conference on Learning Representations. https://openreview.net/forum?id=frE4fUwz_h
Black Friday PC deals are live! Whether you’re looking for a prebuilt PC or want to build your own customized rig, holiday discounts from top brands like Alienware and HP are out now.
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept”, you consent to the use of ALL the cookies.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duration
Description
cookielawinfo-checkbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checkbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.